用户界面
DANGER
说明 文档中未进行说明的功能或涉及参数调整,会对机器人运行产生影响,若需使用请联系技术支持,请勿私擅自调整。
MovaXHelper软件简介
MovaXHelper是 Mccore 控制系统的上位机软件,具有机器人移动控制、任务编辑、参数设置、 状态监控等功能。该软件可安装于 PC、Pad上,只要与机器人处于同一网段内,连接机器人便可操控机器人。
HMI整体布局
 操作主界面通常由 2 个主要区域构成,包括:顶部状态栏、底部状态栏。
操作主界面通常由 2 个主要区域构成,包括:顶部状态栏、底部状态栏。
顶部状态栏
顶部状态栏,包含:若干一级菜单按钮(设置、日志、选项、遥操)、3DModel按钮、Jog方向示教按钮、系统监测按钮、JOG面板按钮、连接状态、电量显示。
| 状态栏 | 图片指示 | 说明 |
|---|---|---|
| 设置、日志、选项 | 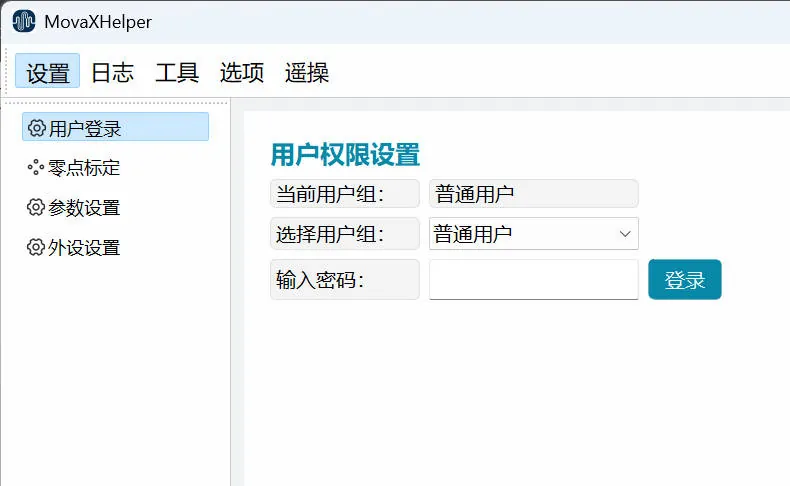 | 一级菜单按钮,包含设置、日志、选项等若干一级菜单 按钮,点击可跳转到功能子界面。 |
| 3DModel | 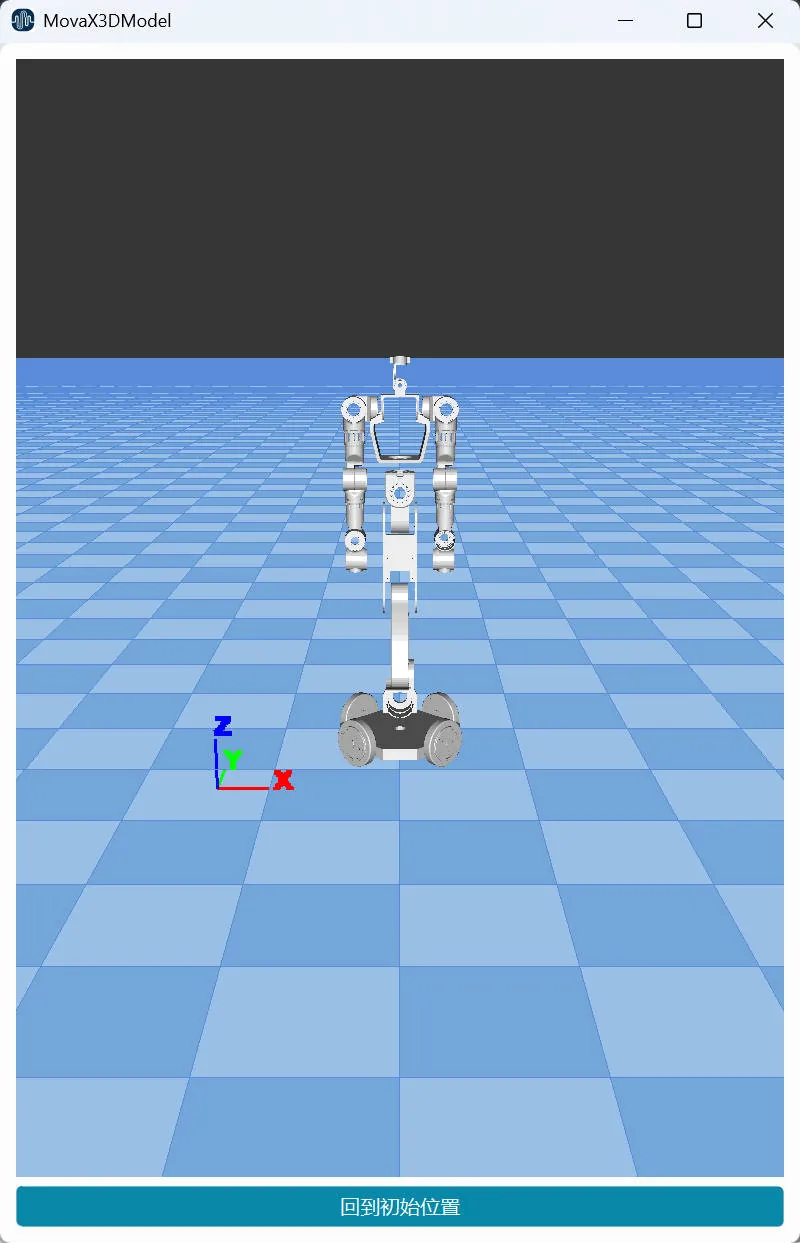 | 3D模型显示按钮,点击可打开、关闭展示面板;该界面以三维模型的方式直观展示机器人当前状态,三维模型可以通过点击拖动的方式切换观 察视角,也可以通过点击“回到初始位置“”按钮让模型回归默认视角。 |
| Jog方向示教 | 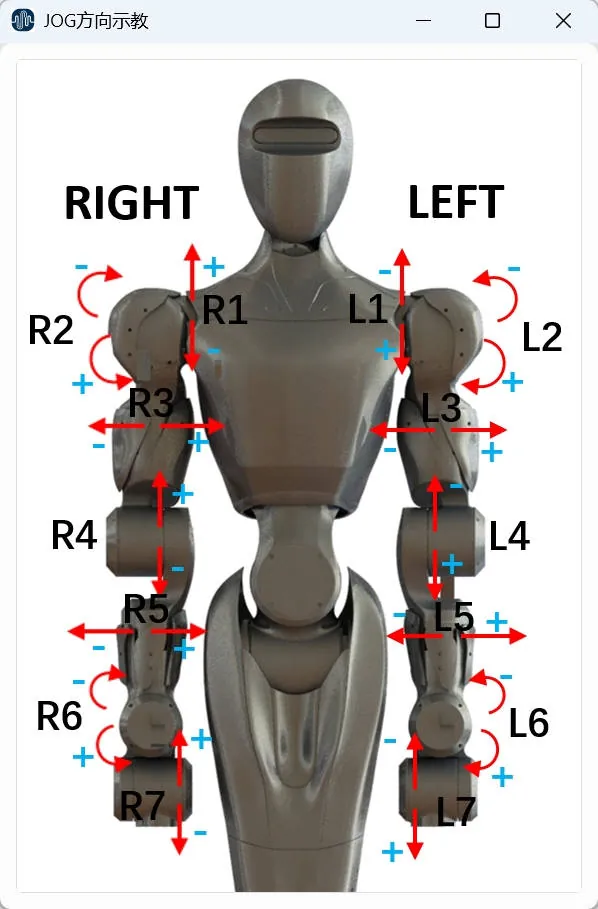 | Jog方向示教显示按钮,展示各关节“+”“-”转动方向,辅助进行Jog操作;点击可打开、关闭展示面板。 |
| 系统监测 | 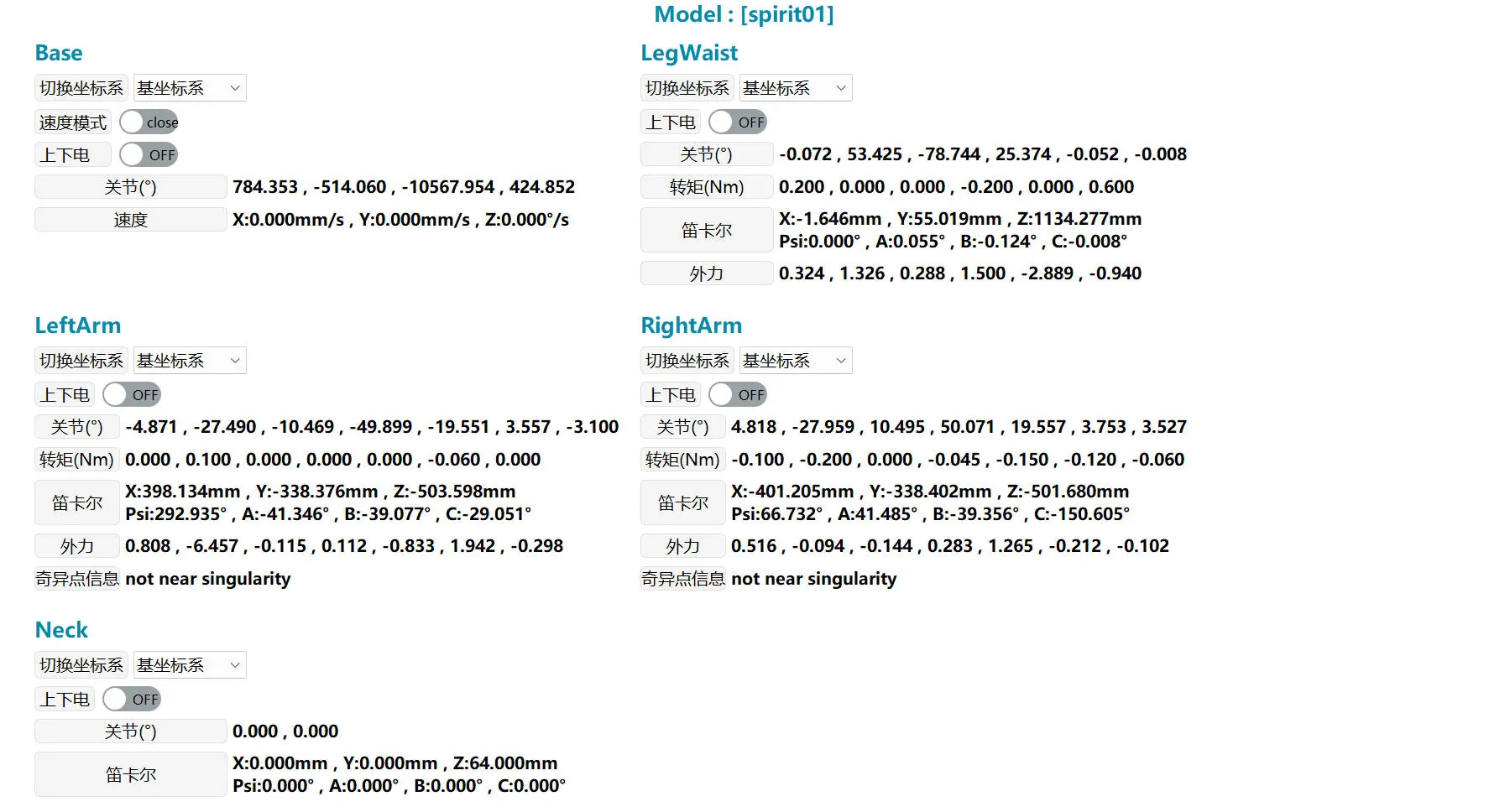 | 系统监测入口按钮,实时显示机器人当前上下电、位姿、受力等状态,点击可打开、关闭操控面板。 |
| JOG面板按钮 | 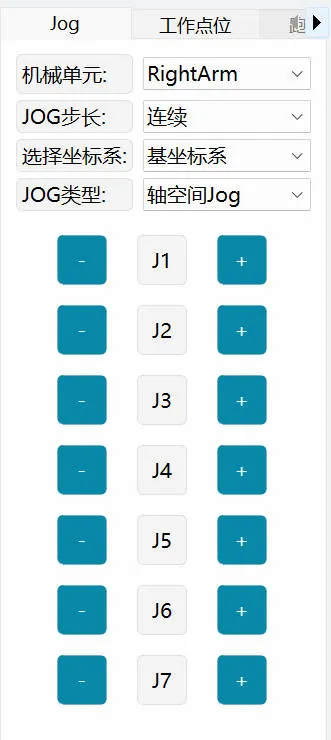 | JOG面板入口按钮,点击可打开、关闭操控面板。 |
| 连接与机器连接状态 |  | MovaXHelper软件与机器人的连接状态,点击该按钮可打开于机器人的连接设置页面。 图标信号满格为已连接;不满格信则未连接;控制器服务未连接状态,无法操作机器人和设置机器人参数。 |
| 机器电量显示 |  | 机器人电量显示 |
左侧边栏
 当通过顶部状态栏切换不同的功能,例如设置、工具等,左侧边栏会显示相应功能的子菜单。
当通过顶部状态栏切换不同的功能,例如设置、工具等,左侧边栏会显示相应功能的子菜单。
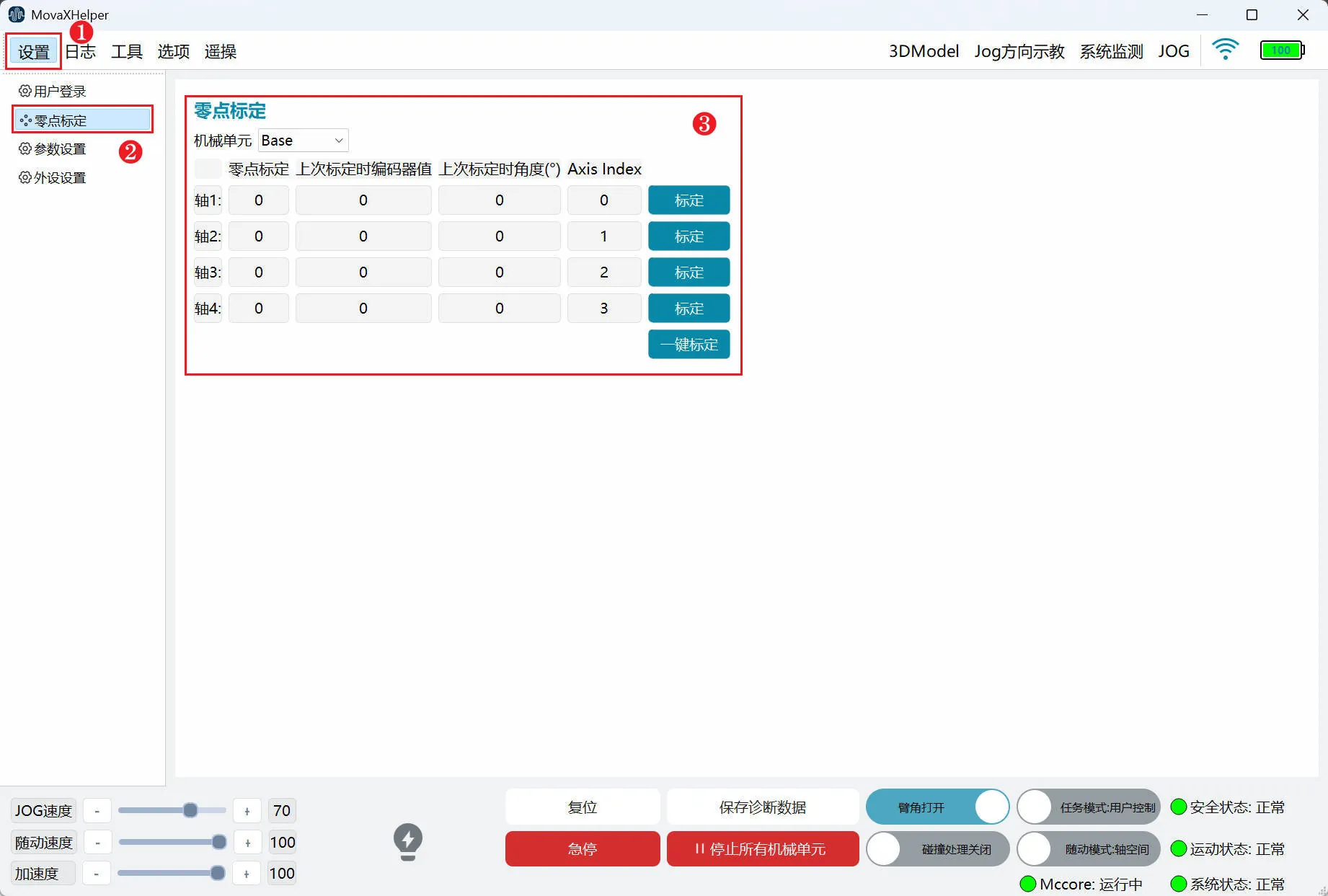
如上图所示,在顶部状态栏点击“设置”,左侧边栏显示所有“设置”子菜单。点击“零点标定”,进入“零点标定”设置页面。
右侧操控面板
点击顶部状态栏的JOG按钮,可打开右侧操控面板,操控面板用于对机器人进行移动控制、自动标定等。
| 状态栏 | 图片指示 | 说明 |
|---|---|---|
| Jog | 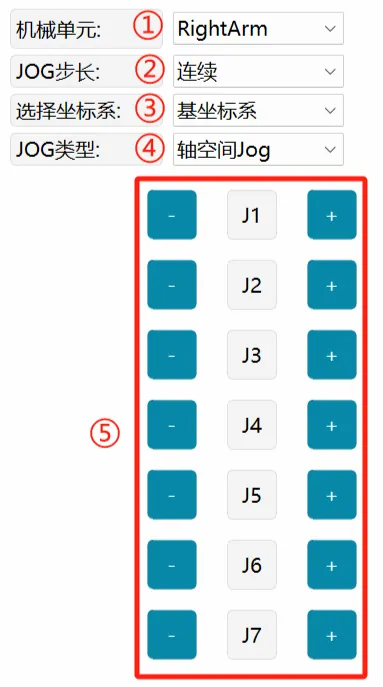 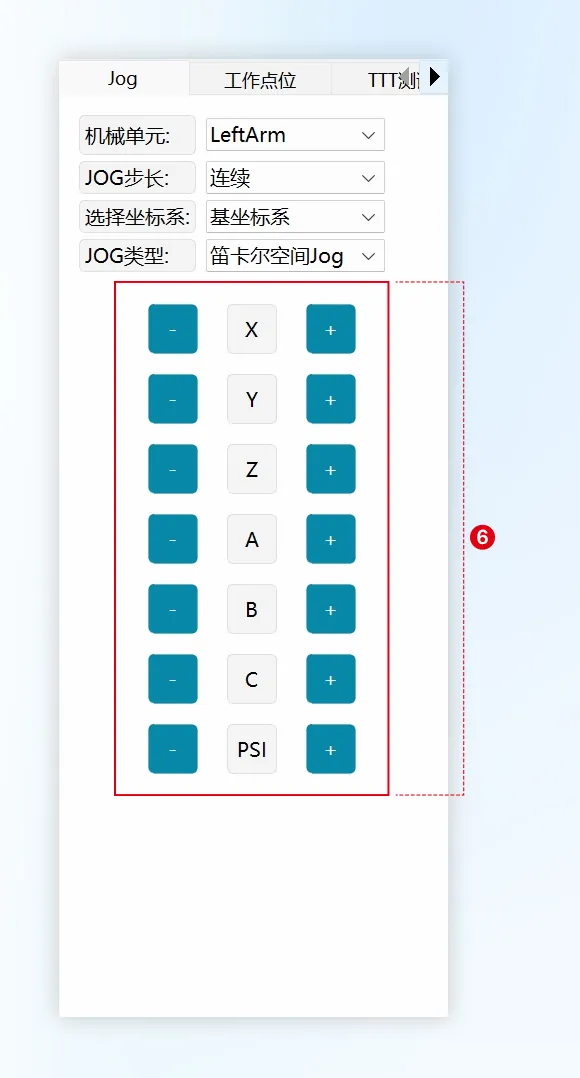 | ①机械单元:选择要进行Jog的机械单元,包括LeftArm(左臂)、RightArm(右臂)、LegWaist(腰腿)和Base(移动平台) ②JOG步长:可选连续Jog和步进Jog,并且可以调整增量步进的大小。 ③选择坐标系:用以选择笛卡尔模式下的参考坐标系,包括:基坐标系、移动平台基坐标系。 ④JOG类型:用来选择Jog时的单轴模式和笛卡尔模式。 ⑤轴空间Jog按钮:轴空间Jog时显示J1~J6/J7(视①中选择机械单元决定)。 ⑥笛卡尔空间Jog按钮:笛卡尔空间 Jog时显示X/Y/Z/A/B/C及PSI。 |
| Jog-移动平台 | 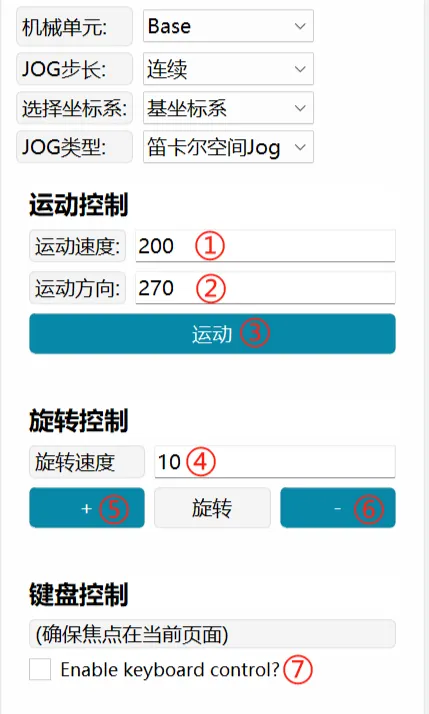 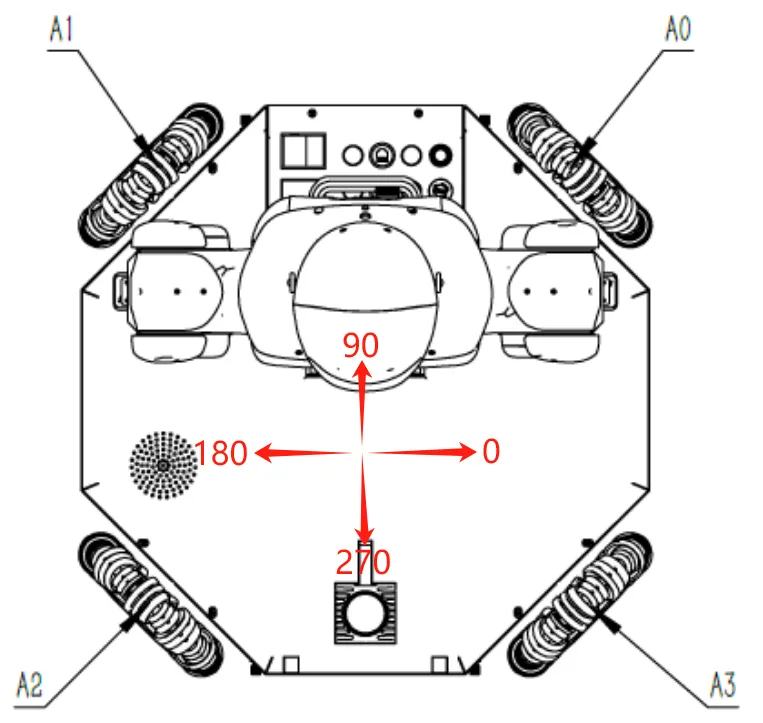 | 移动平台运行速率在“设置-参数设置”进行调节,调整范围1-100%,是相对②④速度限制的百分比。 移动平台JOG仅支持笛卡尔模式。 运动控制:控制移动平台不同方向上直线运行。 ①运动速度:有效范围0-500,单位:mm/s ②运动方向:有效范围0-360,对应运动方向如左侧示意图。 ③运动:点击按钮,移动平台开始运行,松开停止。 旋转控制:控制移动平台在“+”“-”方向进行自转 ④旋转速度:有效范围0-60,单位:°/s ⑤+:移动平台按“0-90-180-270-0”的方向自转 ⑥-:移动平台按“0-270-180-90-0”的方向自转 键盘控制:使用键盘“↑”“↓”“←”“→”键控制移动平台运行 ⑦Enable keyboard control?:勾选本项,即可通过键盘控制移动平台运行: ↑:与②中填入运行方向一致,直线运行 ↓:与②中填入运行方向相反,直线运行 ←:移动平台按“0-90-180-270-0”的方向自转 →:移动平台按“0-270-180-90-0”的方向自转 使用键盘时,需保持鼠标焦点在当前页面。 |
| 工作点位 |  | ①工作点位:选择已建立的工作点位 ②选择机械单元:选择需要移动的机械单元 ③回零:单机械单元各轴回到零点 ④单机械单元移动:单机械单元运动至①中选择的工作点位 ⑤全部移动:②中选择的机械单元运动至①中选择工作点位 |
| 跑合测试 |  | ①是否循环:勾选本项,将循环运行跑合点位 ②选择机械单元:选择需要运行的机械单元 ③单机械单元运行:单机械单元运行 ④全部TTTT:②中选择的机械单元运行 |
| 自动标定 |  | ①选择机械单元:选择需要标定的机械单元,双臂和腰腿无法同时选择 ②单机械单元标定:单机械单元标定 ③全部标定:①中选择的机械单元标定,双臂和腰腿无法同时选择 |
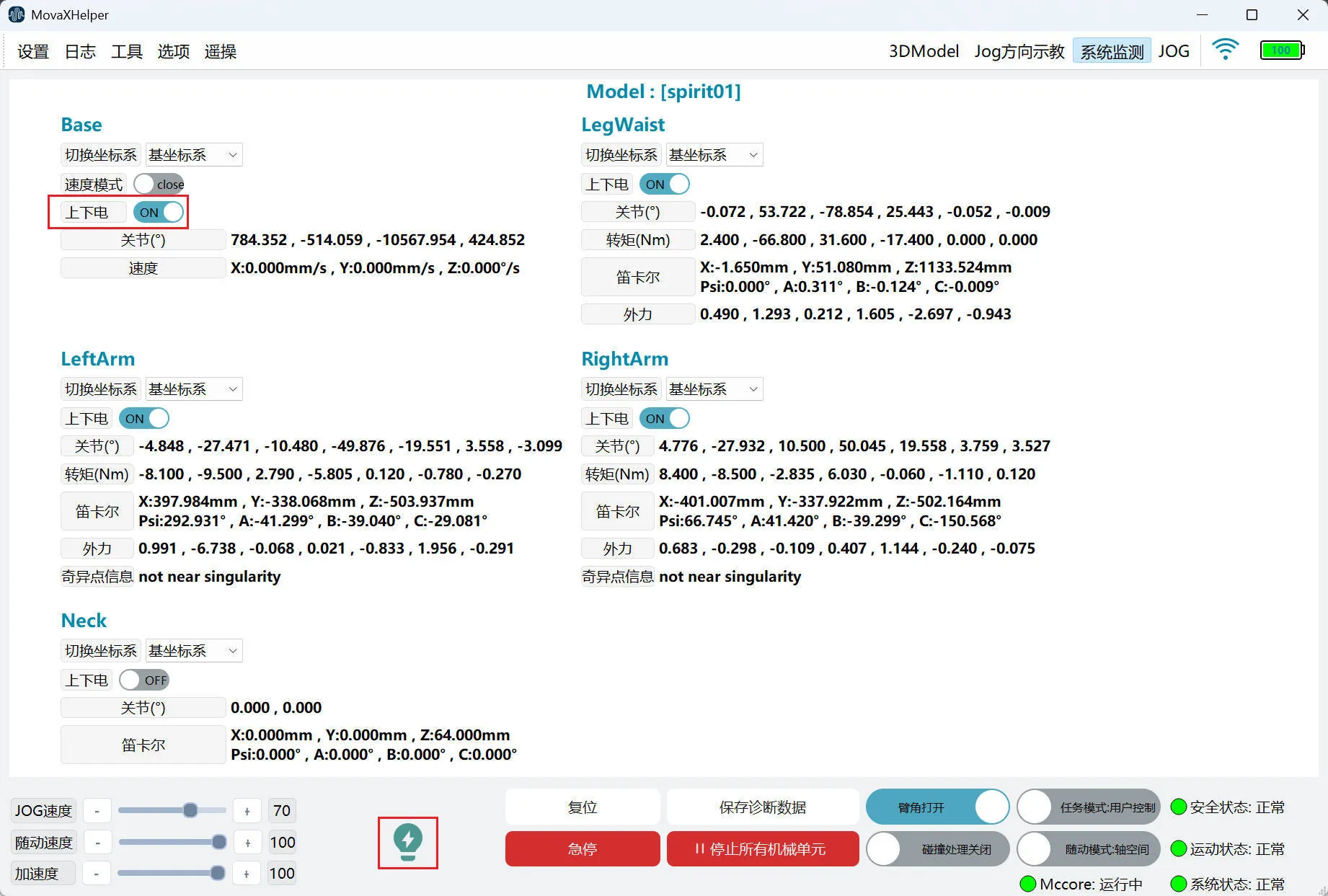
底部状态栏

| 序号 | 说明 | |
|---|---|---|
| ① | 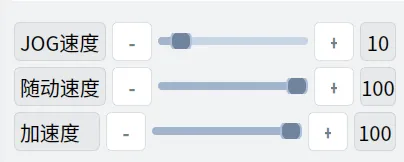 | 运行速度调整控件,用来调节双臂及腰腿运行时的运动速度,可调范围 1%~100%。JOG速度与随动速度分别独立影响用户控制和外部控制模式的运行速度,加速度为两种模式通用。点击滑条或者-/+按钮,可以微调程序速度(-/+1%)。 |
| ② |  | 全部机械单元电机处于下电状态,单击所有机械单元上电。 |
 | 部分机械单元电机处于上电状态,单击所有机械单元下电。 | |
 | 全部机械单元电机处于上电状态,单击所有机械单元下电。 | |
| ③ |  | 伺服复位按钮,当机器人处于急停或伺服报错状态时,在消除导致以上状态的因素后,点击此按钮可恢复机器人状态。 |
| ④ |  | 急停按钮 |
| ⑤ |  | 手动保存前60s的诊断数据。 |
| ⑥ |  | 用户控制模式下,单击后所有机械单元停止运行,但保持上电状态。 |
| ⑦ |  | 臂角开关,默认开启状态;外部控制时建议打开。 |
| ⑧ |  | 功能仅在发生碰撞检测时生效,可选择pose和force两种模式,用以清除碰撞报警。 |
| ⑨ |  | 用户控制模式,可通过HMI、手柄等操作机器人。 |
| ⑩ |  | 外部控制模式,不可通过HMI、手柄等操作机器人。 |
| ⑪ |  | 当前控制器的安全状态:绿色表示安全状态;红色表示非安全状态。 |
| ⑫ |  | 当前机器人运行状态:绿色表示空闲状态;红色表示忙碌状态,机器人在运动中。 |
| ⑬ |  | 当前控制系统的状态:绿色表示正常运动状态;红色表示系统异常。 |
| ⑭ |  | 程序运行状态,连接monitor之后获取。 |
| ⑮ |  | 程序运行正常,如果为红色代表程序没有正常启动,需点击启动控制器,等待程序运行。 |
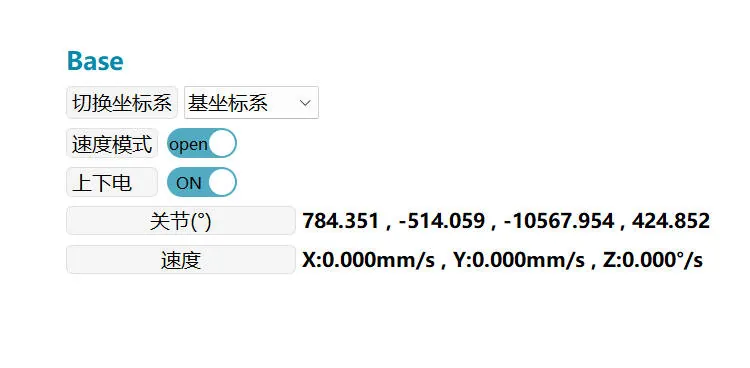
系统监测
点击顶部状态栏状态的“系统监控”按钮,可打开状态监控面板。通过状态监控面板可监控:机器人各关节当前角度、转矩、笛卡尔位姿、受到外力情况及奇异点信息等,方便用户快速了解机器人状态。 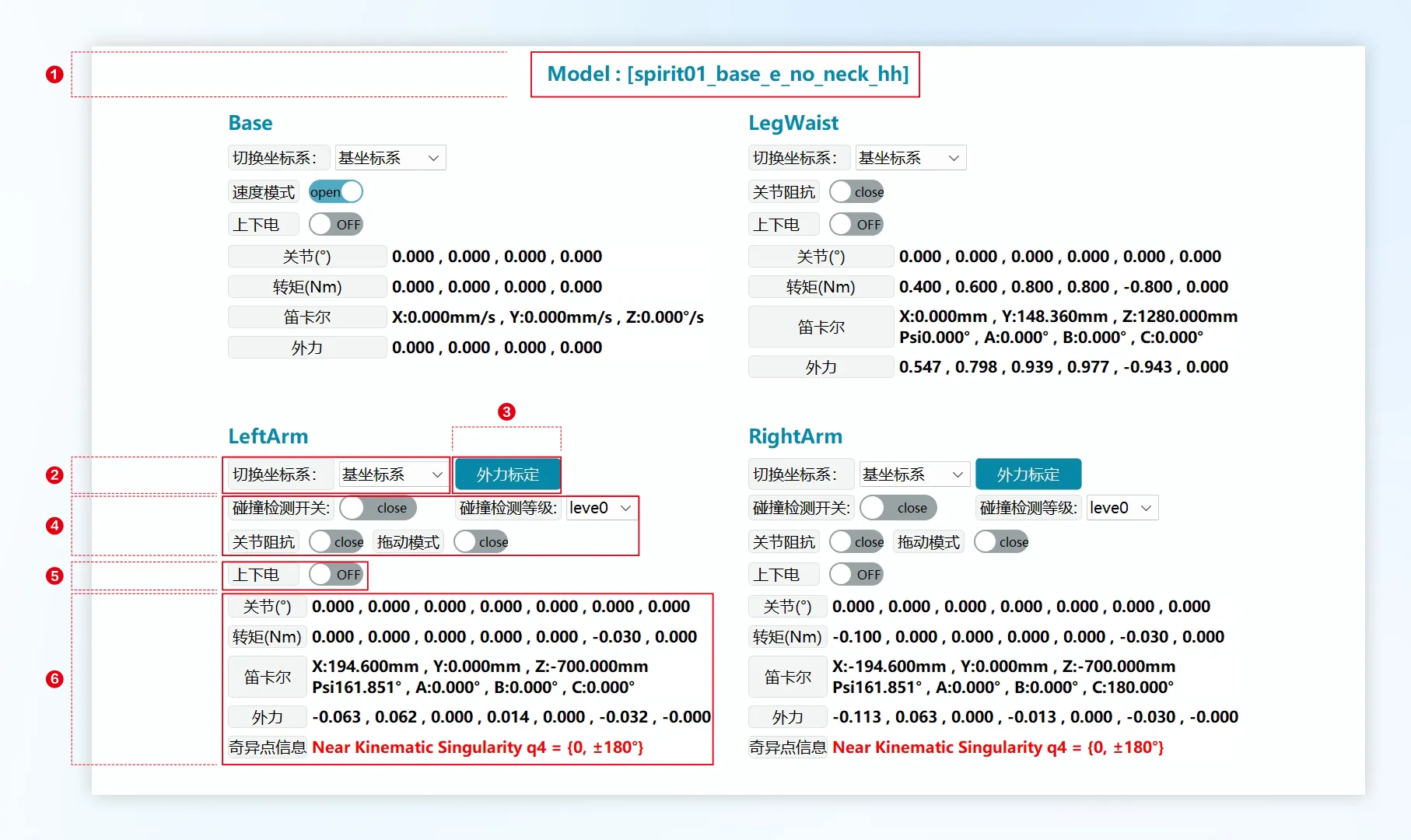
| 序号 | 说明 |
|---|---|
| ① | Model:机器人当前使用的模型。 |
| ② | 切换坐标系:可选择基坐标系与移动平台基坐标系,⑥中笛卡尔示数会随之变化。 |
| ③ | 外力标定:机械单元处于零点位姿时,进行外力标定。 |
| ④ | 力控相关功能。 |
| ⑤ | 上下电:单机械单元上下电开关。 |
| ⑥ | 关节:机械单元各轴当前轴角度。 转矩:机械单元各轴当前转矩。 笛卡尔:机械单元末端相对于当前坐标系下的位置和姿态。 外力:机械单元各轴当前受到外力情况。 奇异点信息:当机器人处于奇异点附近时,红色示警,此时笛卡尔空间运动或会受到影响,某些关节的速度可能会非常快,可能导致报错, 机器人运行中止。 |
上下电
用户可通过“系统监控”页面的上下电开关给单机械单元上下电,也可通过底部状态栏的按钮进行控制所有机械单元的上下电。
系统监控
| 状态指示 | 说明 |
|---|---|
 | 机械单元当前处于下电状态,单击为该机械单元上电。 |
 | 机械单元当前处于上电状态,单击为该机械单元下电。 |
 | 机械单元当前处于异常下电状态,需清除异常情况后才能正常上下电。 |
底部状态栏
| 状态指示 | 说明 |
|---|---|
 | 全部机械单元电机处于下电状态,单击所有机械单元上电。 |
 | 部分机械单元电机处于上电状态,单击所有机械单元下电。 |
 | 全部机械单元电机处于上电状态,单击所有机械单元下电。 |
移动控制
JOG点动
请先阅读 MovaXHelper软件简介,关于界面功能按键设置。
机械单元Jog点动支持轴空间和笛卡尔空间两种模式:
轴空间:单独控制各轴运动。运动方向参见“JOG方向示教”。
笛卡尔空间:单独控制机械单元,沿给定的坐标系方向进行运动。例如选择“基坐标系系”,Jog X,将沿基坐标系 X 向平移运动; 选择“移动平台基坐标系”,Jog B,将沿移动平台基坐标系的Y向旋转。运动方向参见“3DModel”。
INFO
安全起见,坐标系选择权限暂不对用户开放,JOG时均按控制器默认坐标系运行。
Jog点动支持连续和步进两种模式:
连续运动模式下,机器人上电后,按住Jog按键,机器人在设定Jog速度下连续运动,直至松开使能或者Jog按钮。
增量步进模式下,机器人上电后,每按一次Jog按键,机器人运动给定的步长;用户可根据需要选择合适的步长大小,主要用来精确调整机器人位姿。

Jog速度设置:通过移动平台状态栏速度设置空间来控制Jog时机器人的运动速度,可选范围1%~100%,100%时对应机器人最大TCP速度 250mm/s。受安全法规限制,笛卡尔空间Jog和轴空间Jog,TCP线速度均不会超过 250mm/s。
移动平台JOG
JOG移动平台时需先打开“系统监测”页面“速度模式”开关再上电。

移动平台的运行速度,通过“设置-参数设置”页面进行设置,调整范围 1~100%,为相对JOG页面移动平台“运动速度”和“旋转速度”的百分比。
颈部关节JOG
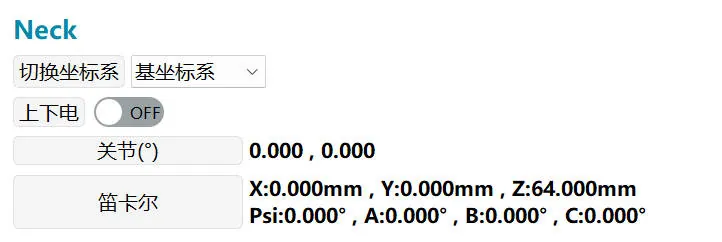 |  |
颈部关节JOG控制方式:J1为左右旋转,J2为上下俯仰
 工作点位设置与运行(左右最大限位值为±65,俯仰最大限位值为-3,50)
工作点位设置与运行(左右最大限位值为±65,俯仰最大限位值为-3,50)
TIP
注意:jit_pos:此参数可设定为需要的姿态,待再次上电后会运行至所设定好的姿态位置
工作点位
HMI右侧操控面板“工作点位”提供快速位姿调整功能,用户可通过顶部状态栏“工具”进入“设置工作点位”页面,将常用位姿设为工作点位。 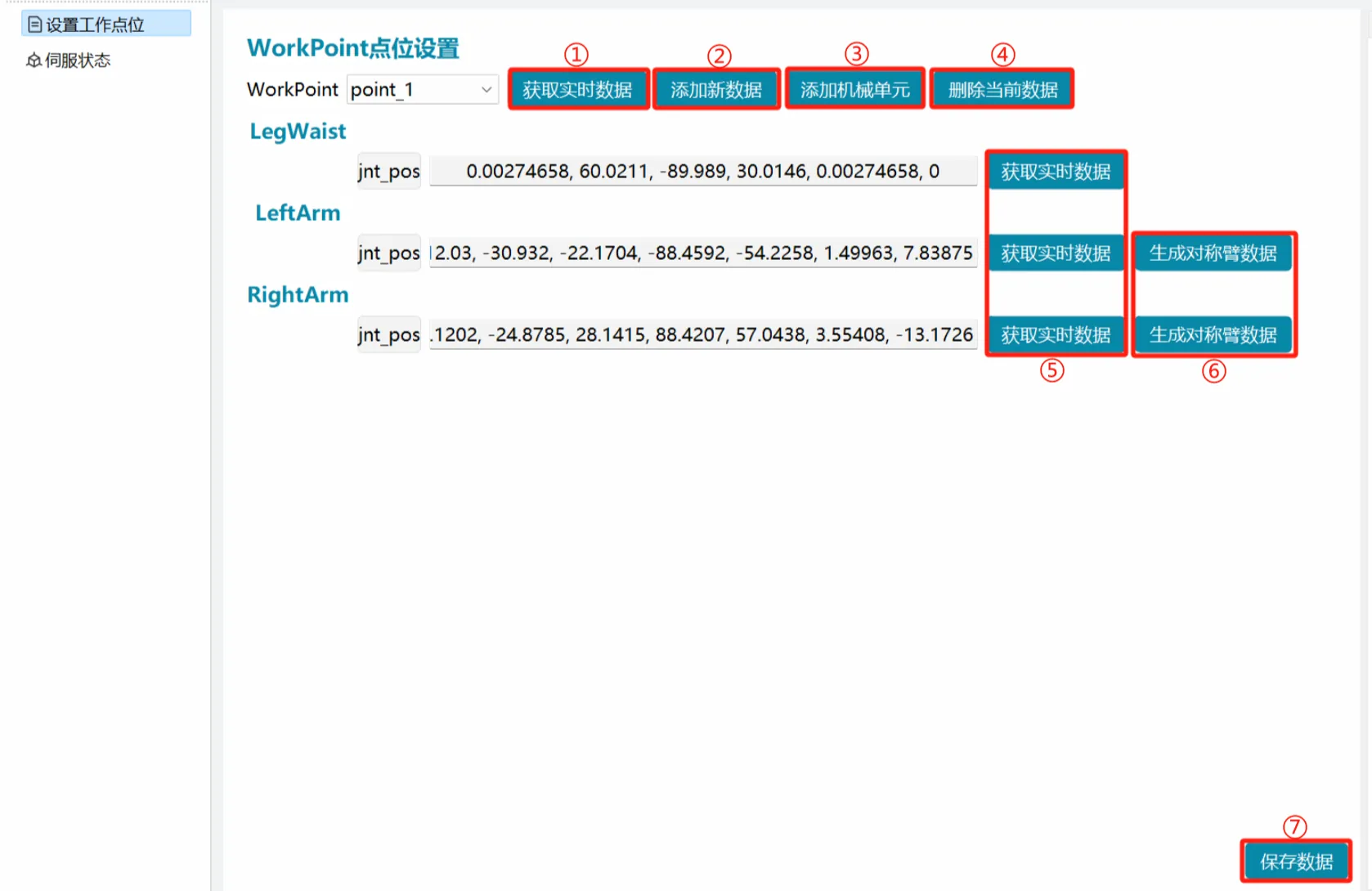
- ① 获取实时数据:获取所有机械单元当前角度值,并更新至所选点位中。
- ② 添加新数据:添加新工作点位。
- ③ 添加机械单元:添加机械单元(当前仅支持添加双臂+腰腿,不支持移动平台)。
- ④ 删除当前数据:删除当前选择工作点位。
- ⑤ 获取实时数据:获取单机械单元当前角度值,并更新至该点位所选机械单元中。
- ⑥ 生成对称臂数据:左右臂相互生成对称数据。
- ⑦ 保存数据:保存对该点位的操作。
举例,点击②“添加新数据”,跳出弹窗为新点位命名,命名不可重复。将机械单元JOG至所需点位,点击①/⑤“获取实时数据”,点击⑦“保存数据”。右侧操作面板“工作点位”即可选择该点位。 ④“删除当前数据”后,也需⑦“保存数据”才可正常删除。
“工作点位”使用方式与Jog操作类似,将机械单元上电,按下相应目标位姿“移动”按钮,机械单元将通过轴空间运动至目标位姿。也可将所有机械单元上电,通过“全部移动”使所有机械单元同时开始向目标位姿移动。
运动过程的速度可通过Jog速度调整。
其中Home(常用初始位姿)、Docking(发货位姿)与手柄绑定,用户可按实际情况调整点位角度值。如未设置,则使用默认配置。
DANGER
机器人当前位姿与目标位姿差异较大时,“全部移动”过程中机械单元之间存在碰撞风险,建议依次调整各机械单元。
跑合测试

用户可通过“跑合测试”页面增加多个点位,方法与“工作点位”基本相同,区别是点击“保存数据”后需重启控制器生效。
需要说明的是,“工作点位”仅支持轴空间运动,“跑合测试”支持轴空间与笛卡尔空间,通过“use_jnt”进行区分。当不勾选该项时,机械单元从上一个点位通过笛卡尔空间的运动方式运行至至当前单位;若勾选,则以轴空间的方式运行。
力控功能
关节阻抗
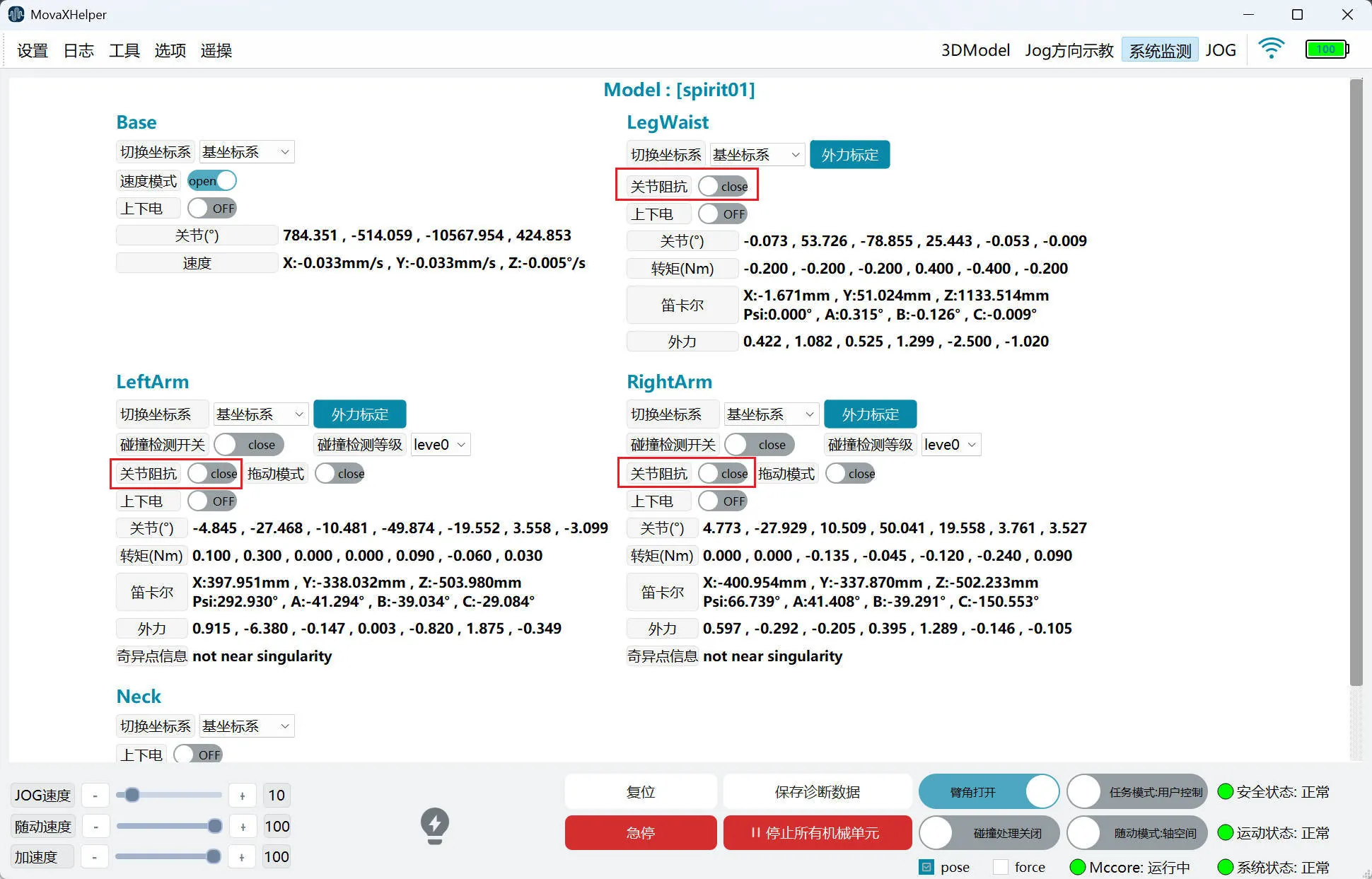 开启关节阻抗后,机械单元会表现出类似于一个带阻尼弹簧的特性, 让机械臂与外界交互时能具备一定的柔顺性。
开启关节阻抗后,机械单元会表现出类似于一个带阻尼弹簧的特性, 让机械臂与外界交互时能具备一定的柔顺性。
关节阻抗功能在“系统监测”页面开启,开启时机械单元需处于下电状态。上电后功能生效。
- 该功能不支持与拖动模式同时开启;支持与碰撞检测功能同时使用。
- 该功能支持用户控制模式与外部控制模式。
- 静止状态、运行状态下均生效。
拖动模式
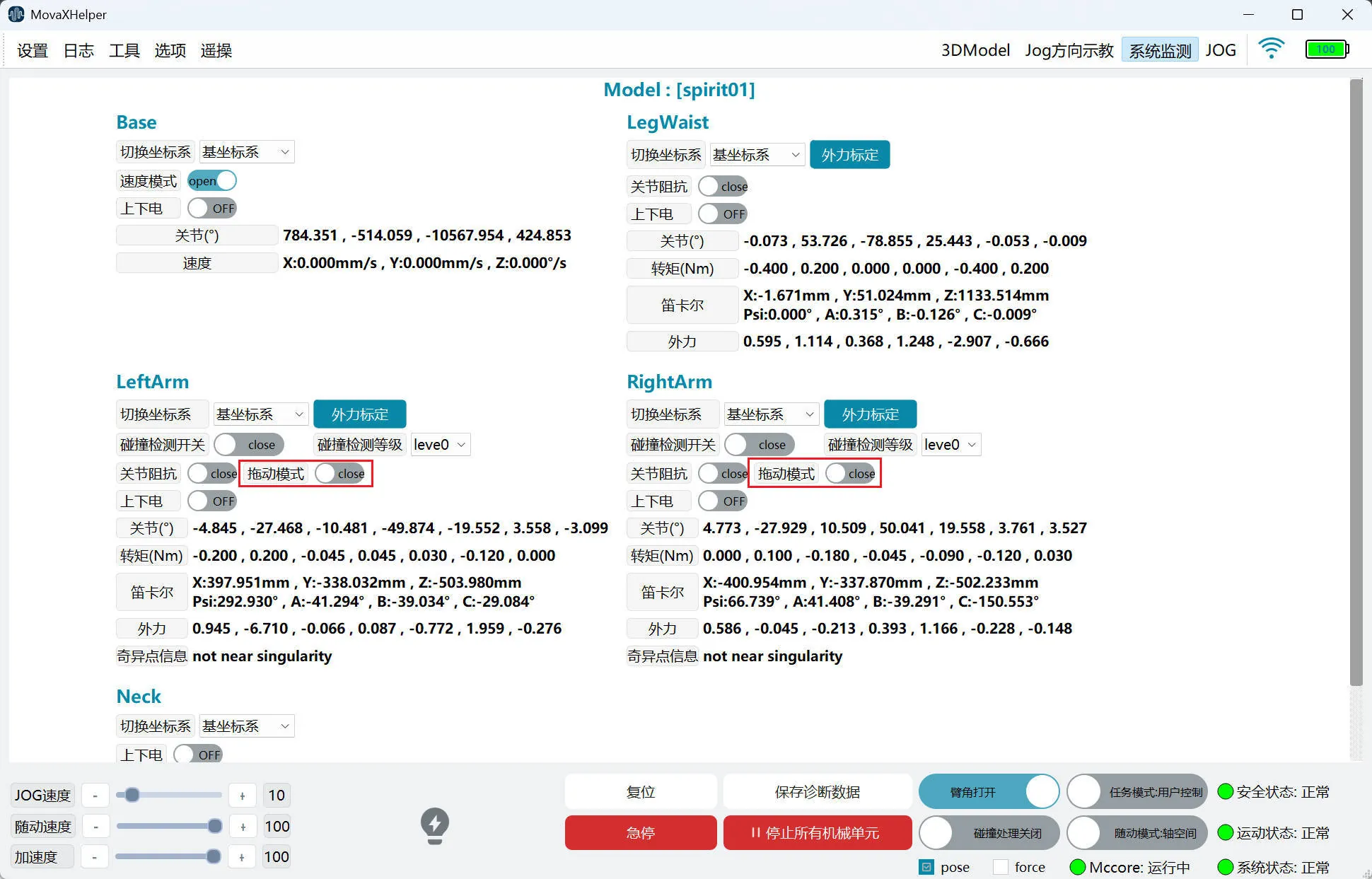 开启拖动模式,机械单元进入“零力空间”,此时用户可通过手动牵引机械单元各关节运动至所需位置和姿态。
开启拖动模式,机械单元进入“零力空间”,此时用户可通过手动牵引机械单元各关节运动至所需位置和姿态。
拖动模式在“系统监测”页面开启,开启时机械单元需处于下电状态。上电后功能生效。
- 当前仅支持双臂。
- 该功能不支持与关节阻抗功能同时开启;不支持与碰撞检测功能同时使用。
- 该功能仅支持用户控制模式。
- 处于拖动模式时,无法使用“Jog”“工作点位”“TTT测试”“自动标定”功能。
开启拖动模式,默认开启虚拟墙。虚拟墙针对机器人拖动场景,限制各关节工作空间,以保护机器人。当拖动关节接近虚拟墙时,用户会感受到虚拟墙的反作用力。
各关节虚拟墙边界为其软限位的5°内。例,关节软限位为-180°至+180°,拖动模式下关节在-175°至+175°内活动。
WARNING
在开启拖动模式前,必须准确设置机器人的动力学参数以及负载参数,否则拖动过程可能存在飘动感。 拖动力过大、速度过快的极限情况下,机器人有可能超出虚拟墙范围,引发错误状态。
碰撞检测

碰撞检测功能是一种基于机器人动力学模型估计的被动检测功能。当机器人在静止或运行过程中与外界发生意外碰撞时,碰撞检测能够及时检测出碰撞,并执行预先设置的处置措施。
碰撞检测功能在“系统监测”页面开启,开启不受机械单元状态限制。上电后功能生效。
碰撞检测等级共8个等级,等级越低,灵敏度越高,机器人越容易检测到碰撞。
- 当前仅支持双臂。
- 该功能不支持与拖动模式同时开启;支持与关节阻抗功能同时使用。
- 该功能支持用户控制模式与外部控制模式。
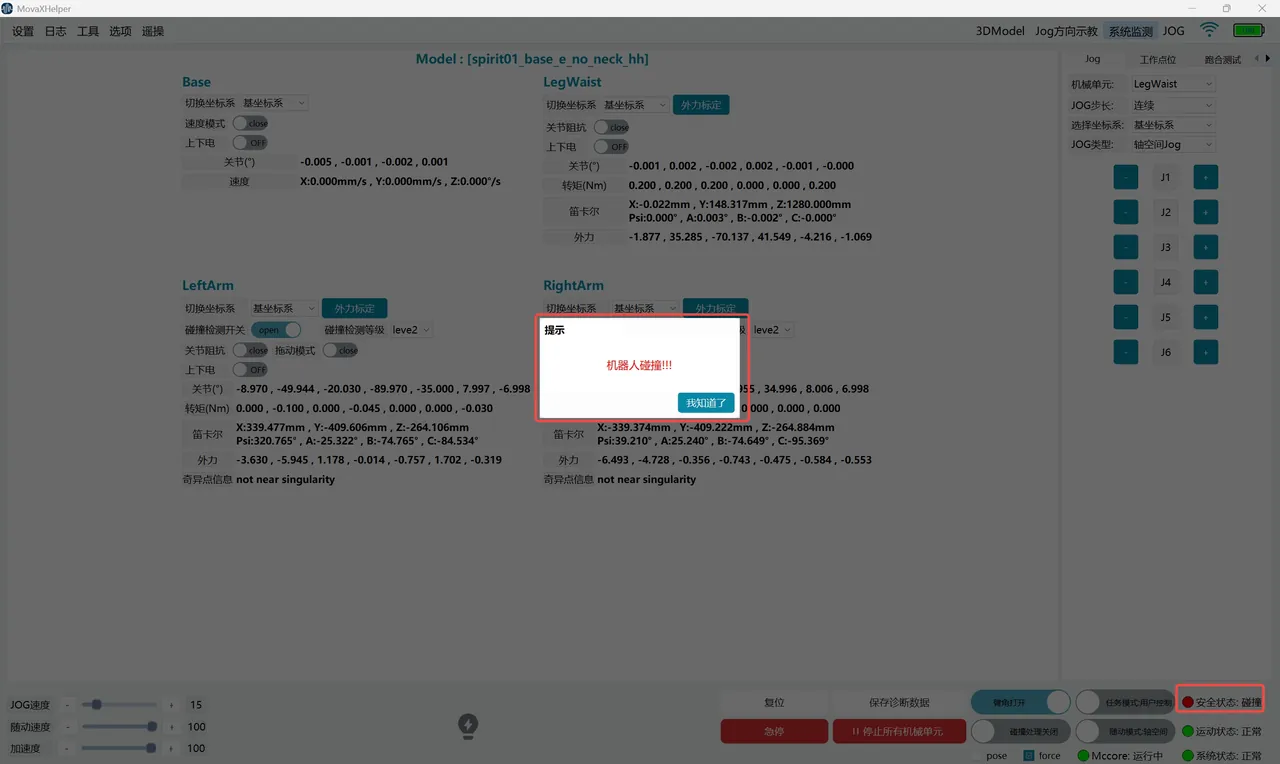
触发碰撞检测后,机器会立即停止并下电,界面会弹窗提示,且底部状态栏“安全状态”状态灯变为红色并显示“碰撞”,此时机器人处于异常状态,不可上电,需通过“碰撞处理”功能进行恢复后继续使用。
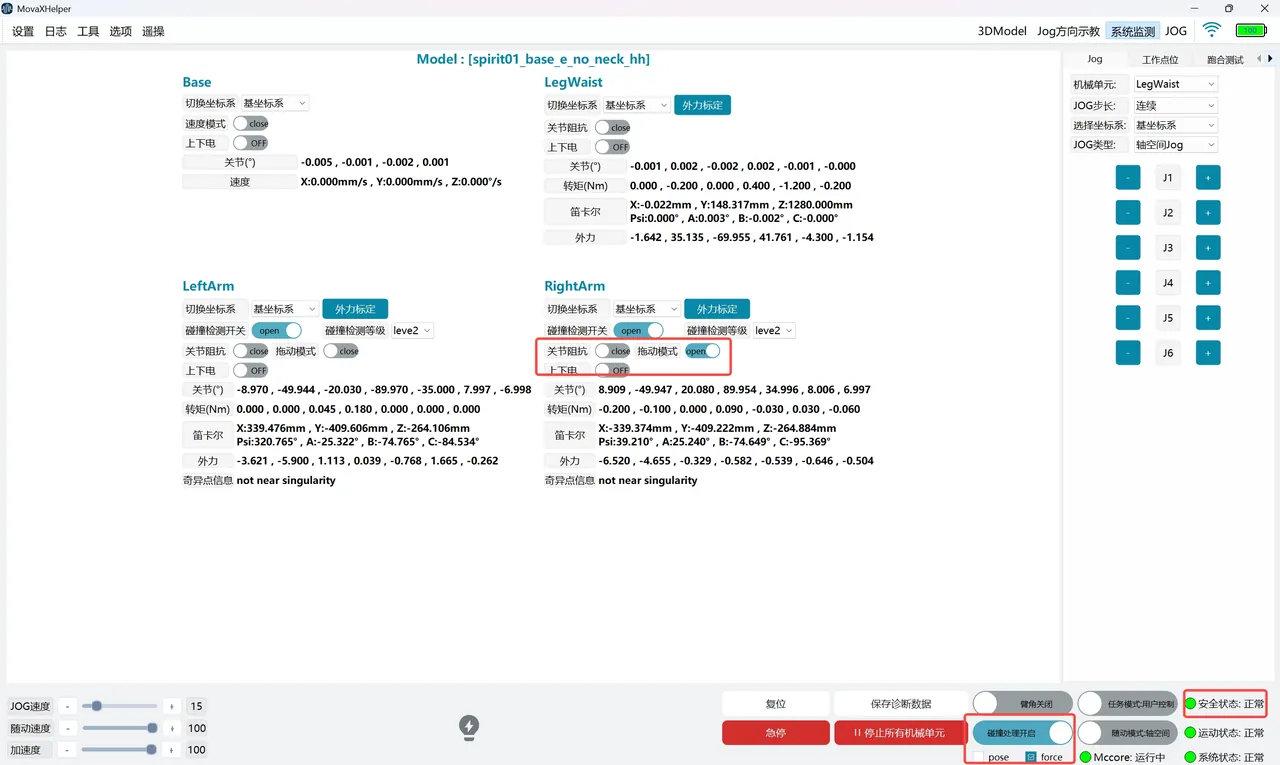
“碰撞处理开启”开关仅在检测到碰撞时开启,开启前需根据碰撞场景选择处理模式,当前支持“pose”和“force”两种模式。
- "pose"模式:此模式通过手动Jog的方式,使发生碰撞的机械单元运行至安全区域;
- "force"模式:此模式通过人工拖动的方式,使发生碰撞的机械单元运行至安全区域; 以"force"模式为例,碰撞处理操作步骤如下:
- 选择“force”模式,打开“碰撞处理开启”开关,“安全状态灯”恢复为绿色且显示“正常”;但此时碰撞状态并未恢复,若关闭“碰撞处理开启”开关会变回“碰撞”。
- 拿好手持急停,打开发生碰撞机械单元“拖动模式”开关并上电;若此前机械单元一直与碰撞物体发生接触,则此时上电后机械单元会往远离物体的方向移动一段距离,直至不再与碰撞物体接触;
- 手动将机械单元拖动至安全区域;
- 关闭“碰撞处理开启”开关,“安全状态”灯为绿色且显示“正常”,表示碰撞状态已清除。 若选择“pose”模式,则开启开关后直接上电,将机械单元Jog至安全区域即可,无需打开“拖动模式”。
WARNING
碰撞检测等级选择不对,可能会引起机器人碰撞误报,请根据不同的应用场景,选择不同的检测等级。
发生严重碰撞时,或会造成力矩传感器损坏导致力控功能失效,优先使用“pose”模式进行碰撞处理。
设置功能
零点标定
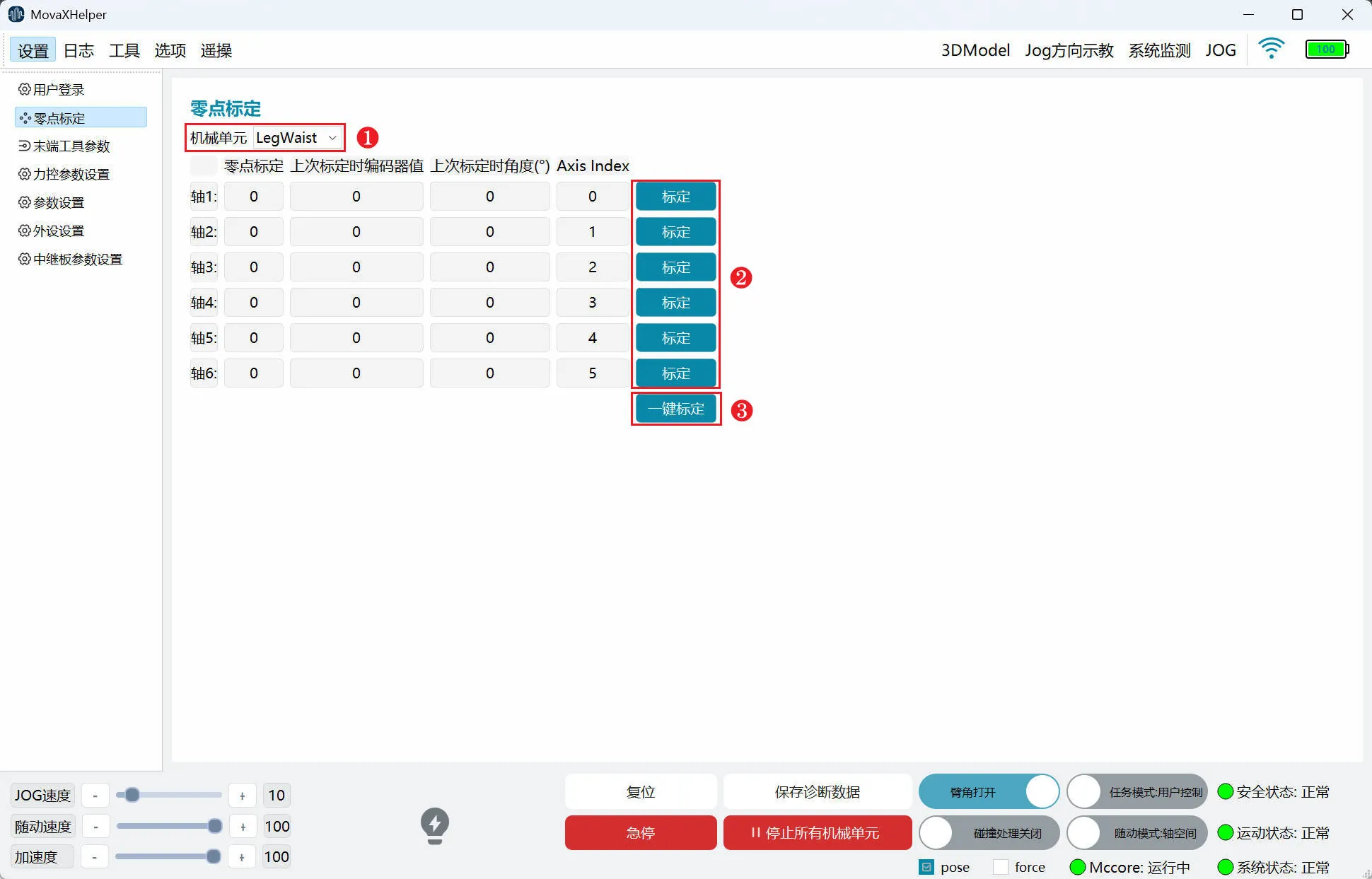
“零点标定功能”指的是机械零点标定,目的是让机器人理论零点与实际机械零点重合。机器人本体上预设了零点标槽,各关节对准,也就是回到机械零点后,即可执行标定。
- ① 机械单元:选择要进行零点标定的机械单元;一般情况下移动平台不需要进行零点标定;
- ② 标定:单关节进行零点标定;
- ③ 一键标定:机械单元所有关节进行零调标定;
 |  |
|---|
标定步骤如下,拿好手持急停,与机器人保持一定距离:
- 通过顶部状态栏“系统监测页面”将单机械单元上电;
- 通过底部状态栏将“JOG速度”调整到10以下;
- 进入右侧操控面板“Jog”页面进行Jog,直至关节零位标槽对齐;
- 通过“零点标定”页面进行标定,注意区分“标定”(单关节标定)及“一键标定”(所有关节标定);
- 重启控制器后生效。
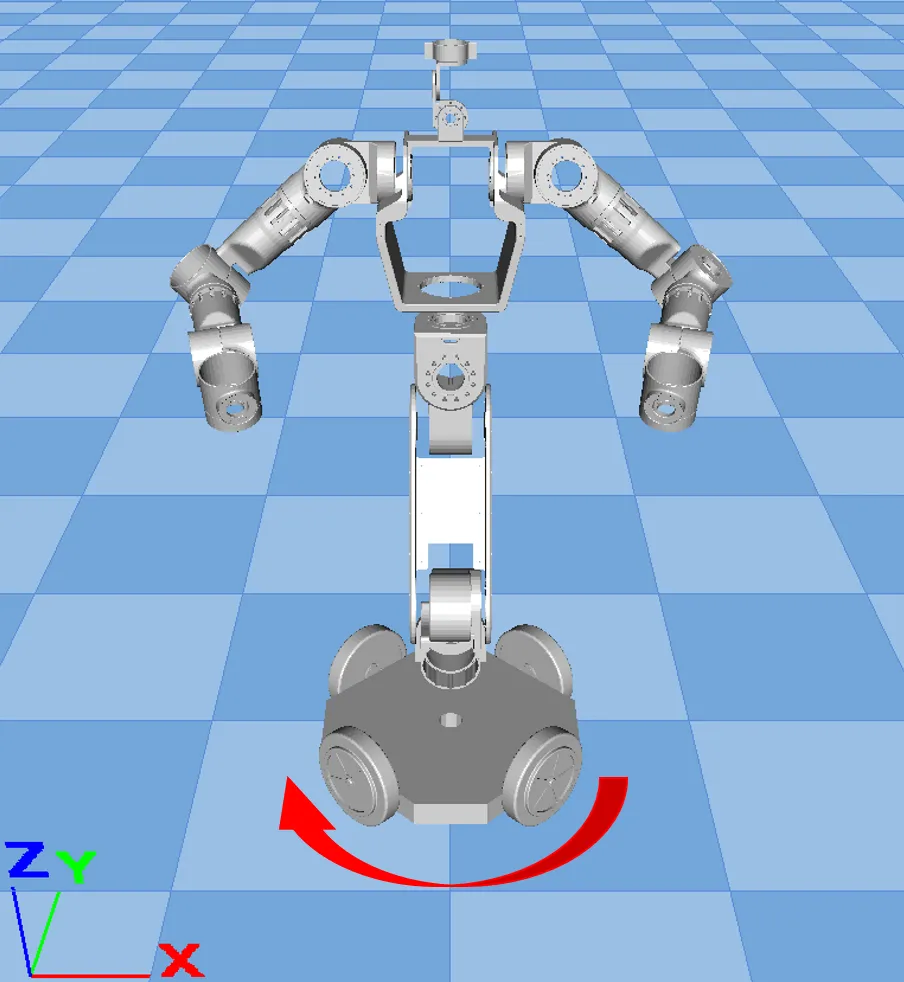
所有关节均处于零点时,机器人位姿如图所示。
DANGER
机械零点请勿随意标定,标定前请使用机械标定块确认机器人各关节都处于零点。
外设设置
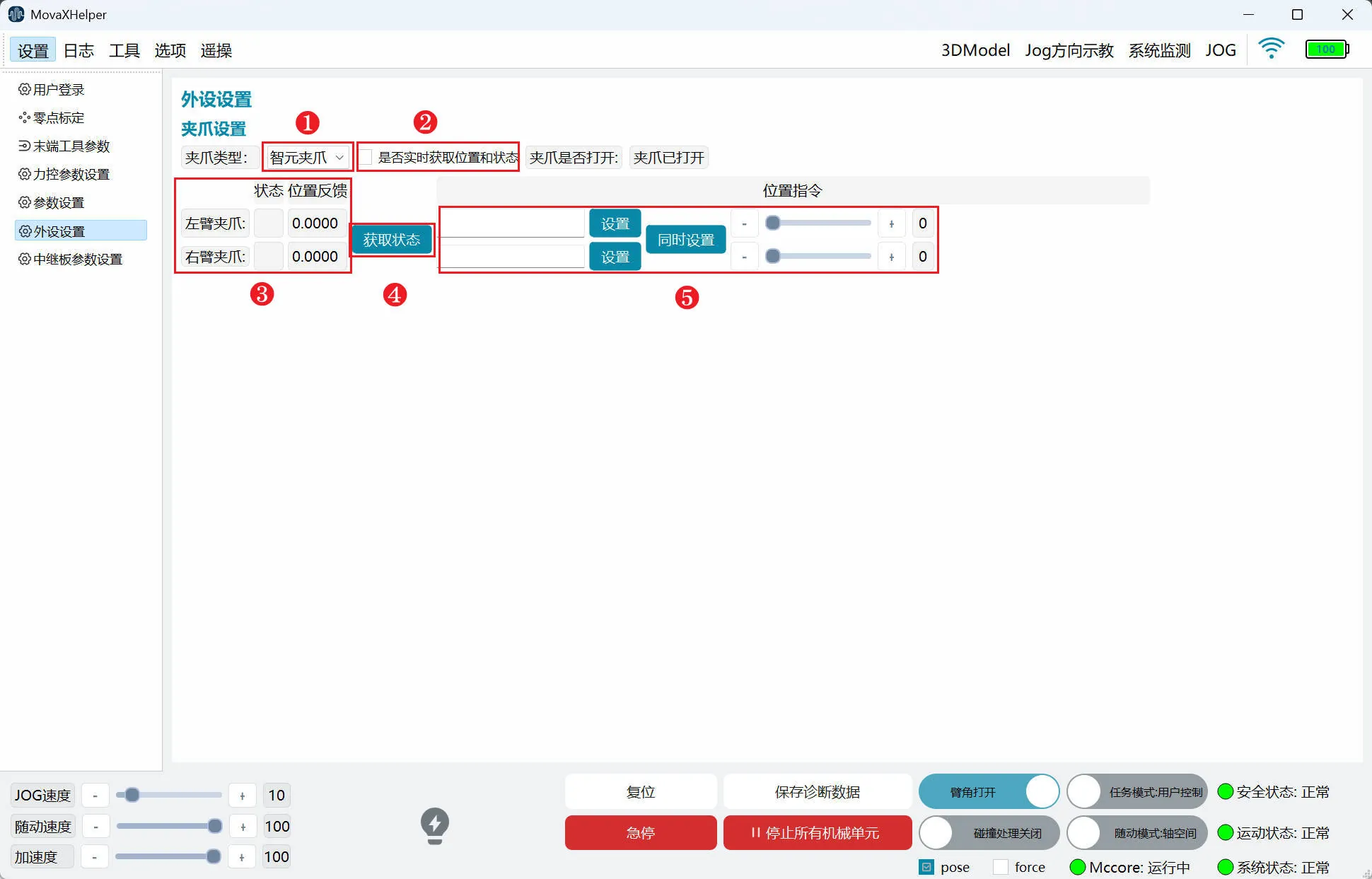
“外设设置”用于调整左右臂夹爪两指末端的开合大小。
- ① 夹爪类型:选择末端夹爪类型;出厂标配智元夹爪,若更换其他类型夹爪,请联系技术支持
- ② 是否实时获取位置和状态:勾选后,③中“状态”及“位置反馈”每秒更新一次;勾选后会持续刷新日志,占用后台资源,非必需建议不要勾选
- ③ “状态”“位置反馈”:夹爪通信状态及当前位置反馈;可通过勾选②每秒更新,也可通过④实时获取
- ④ 获取状态:获取当前夹爪通信状态及位置反馈;
- ⑤ “设置”“同时设置”:“设置”对单爪进行设置,“同时设置”对两爪进行设置;有效范围0-12,单位:cm
- ⑥ 夹爪位置设置控件:作用与⑤相同,单爪设置,最大张合距离12cm
遥操作设置
- 遥操系统版本显示和遥操作HMI版本显示

- 遥操系统版本显示和遥操作HMI版本显示
- 躯干基座系定义上移到底盘之上;
- 遥操作增加头显控制底盘模式,通过VR手柄Y键进行底盘控制模式切换:头显控制或手柄控制;VR手柄B键为双臂回位按键;

- 使用VR进行遥操作时,摇杆控制底盘旋转方向由镜像旋转变更为同向旋转;
 |  |
|---|
- 遥操功能提升连接稳定性和页面易用性:增加连接状态在页面的信息反馈;
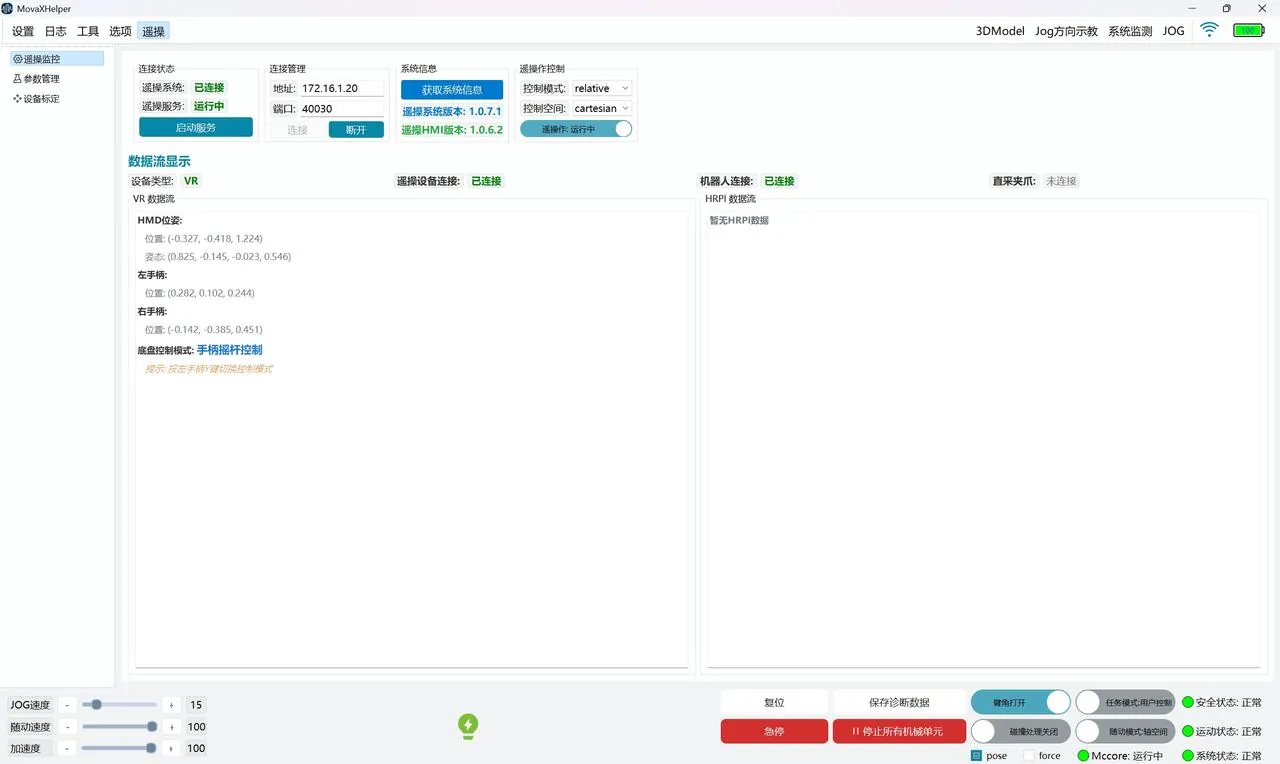
关于遥操具体使用详见遥操作部分快速开始
日志

“HMI日志”用于查询既往伺服报错信息,以进行对应处理。
- ① 日志时间控件:选择日志时间区间;
- ② 日志筛选控件:日志ID、日志类型、日志级别;当前仅对用户开放“伺服错误”类型“ERROR”级别日志查询功能;
- ③ 查询:根据①中选择区间及②中筛选条件进行日志查询;
- ④ 删除:删除本次查询日志;
- ⑤ 查询最近的100条数据:不受①、②限制,查询最近的100条日志信息;
- ⑥ 日志信息显示:日志信息显示,每页显示100条内容,通过拖动左侧滑块浏览;
- ⑦ 翻页控件:单击进行翻页;
版本升级
- 功能位置:选项--版本升级
movax 升级
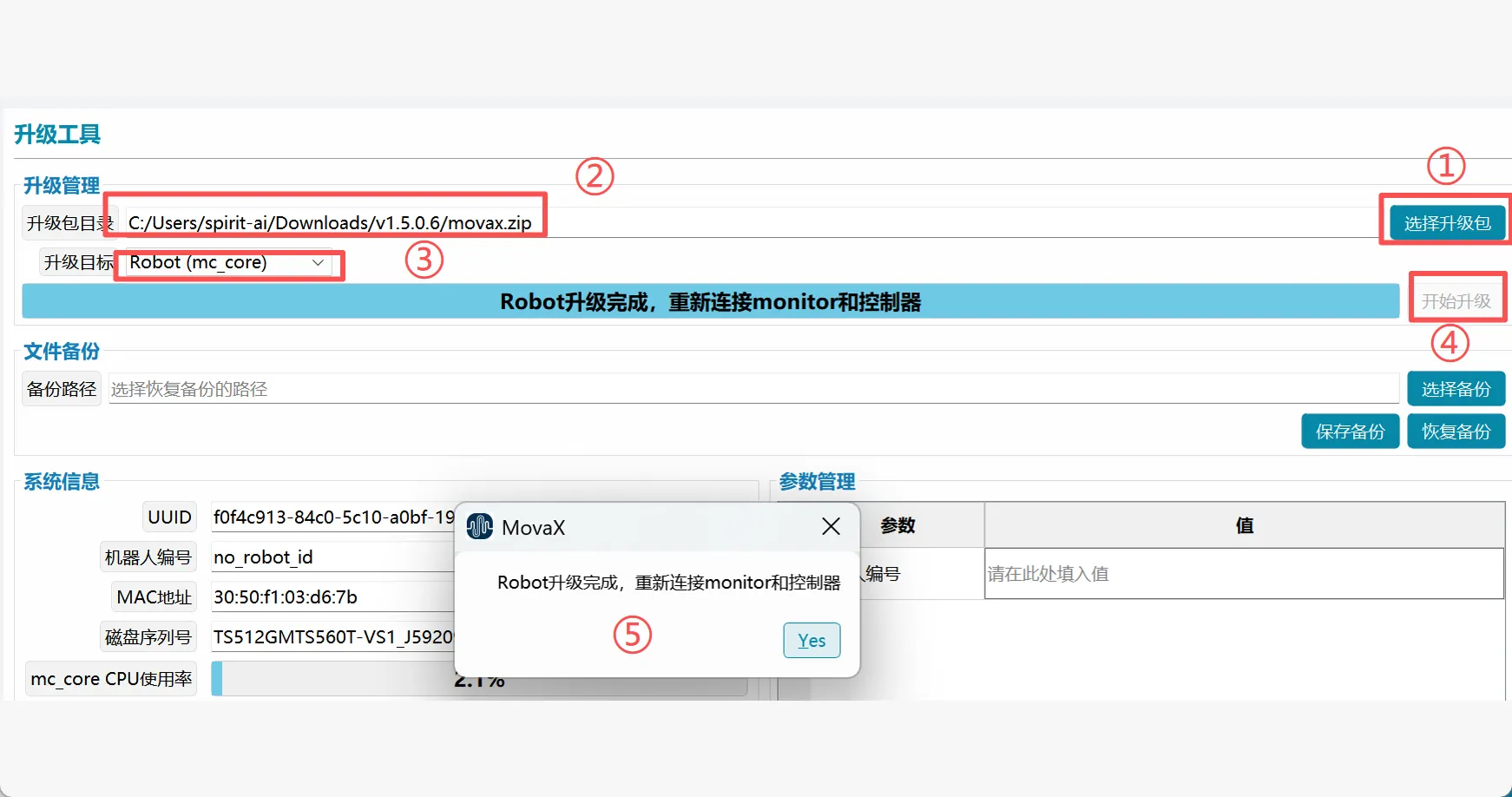
- 点击“选择升级包”;
- 选择本地路径存储的movax.zip文件,升级包目录路径显示以实际所在位置为主;
- 升级目标选择Robot(mc_core);
- 点击开始升级,等待升级完成,按照提示点击连接monitor和启动控制器;
moz_teleop 升级

- 升级目标选择Teleop(moz_teleop);
- 点击选择升级包,升级包目录路径显示以实际所在位置为主;
- 点击开始升级,等待升级完成,重启moz_teleop程序
文件备份

- 选择备份:选择要备份的文件或文件夹;
- 保存备份:将选择备份的文件或文件夹进行备份,防止升级覆盖参数配置、丢失、替换等;
- 恢复备份:根据备份的文件或文件夹进行恢复;
系统信息
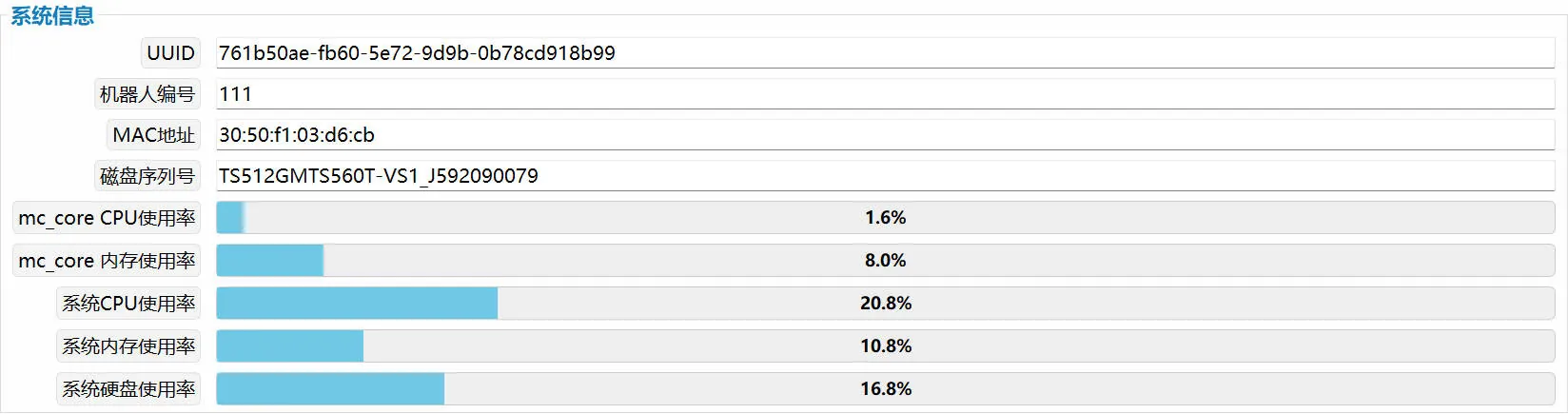
系统信息显示机器人编号、MAC地址、mc_core_CPU使用率、系统CPU使用率、系统内存使用率等信息。