机械结构
机械要求
工作环境
本人形机器人设计适用于标准工业与服务场景,其工作环境参数如下:
工作温度:-10℃ ~ 50℃
在极端低温(-10℃以下)或高温(50℃以上)环境下运行,可能导致关节润滑不良、电池性能下降或材料老化。建议在温度超出±5℃范围时,暂停运行并检查设备状态。
工作湿度:≤75% RH(非凝结)
- 高湿度环境(>75% RH)可能导致电子元件受潮、传感器失灵或内部短路。建议在高湿环境下使用防潮密封罩或环境控制装置(如除湿机)。
IP防护等级:IP40
特别提示:
- 机器人不应在雨天、雪天或露天环境下运行,尤其在湿度>80%且有雨水时。
- 若环境湿度长期高于60%,建议每30天进行一次内部干燥与防潮维护。
- 机器人本体及关节部位应避免直接接触水或腐蚀性液体。
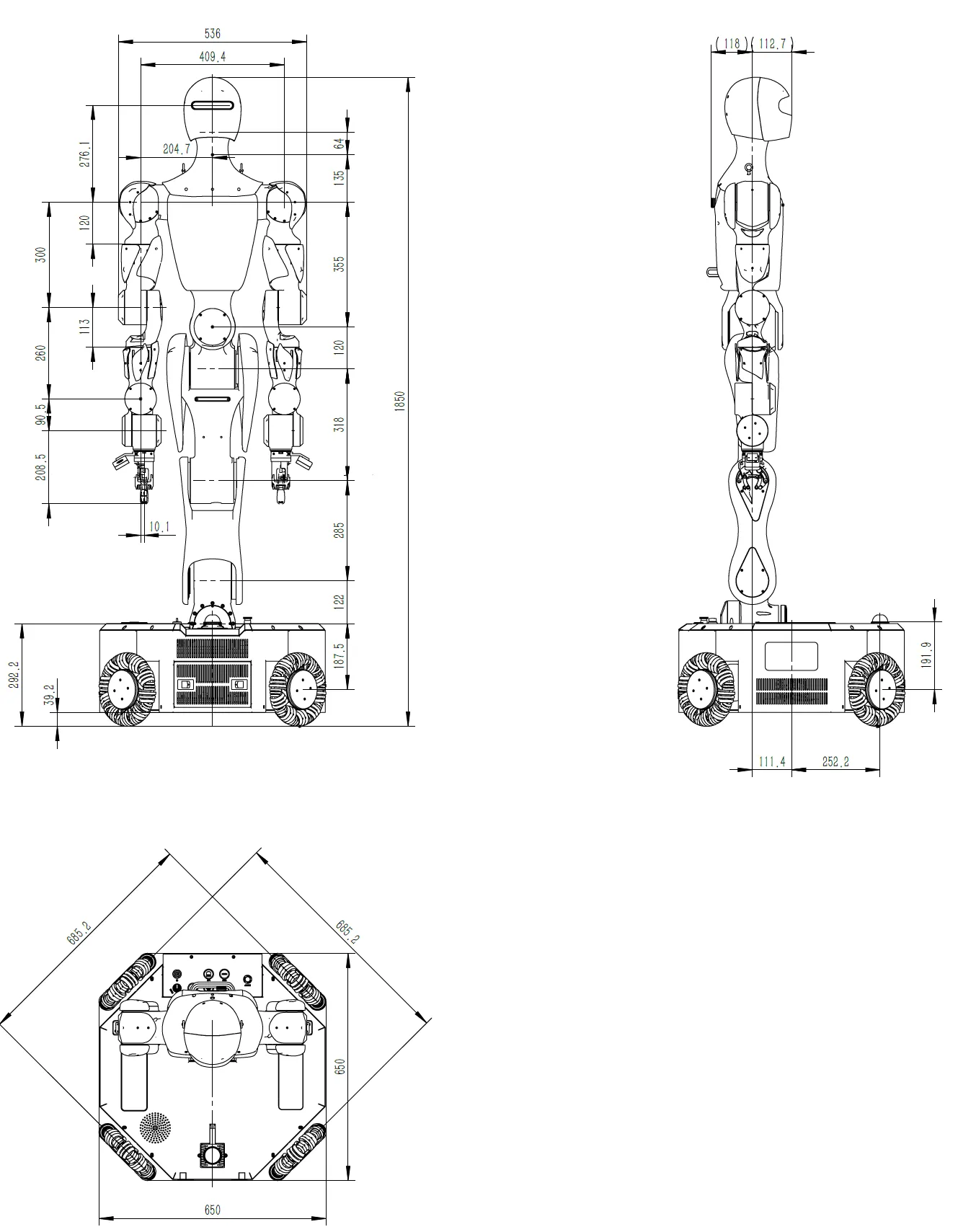
整机尺寸图
整机尺寸如下图:
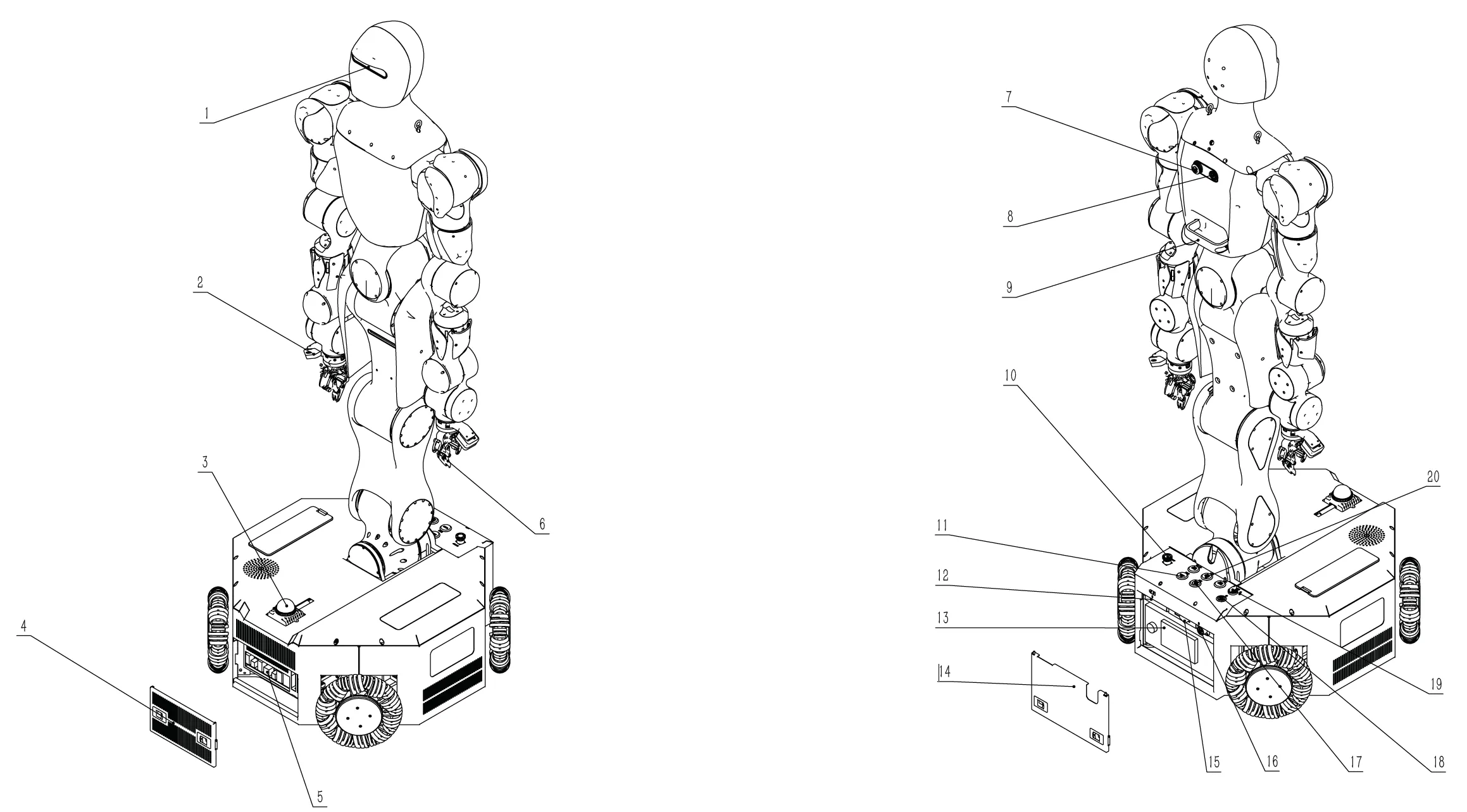
主要部件示意图
Moz1整机上有若干传感器、执行器、接口等,如下图:
| 部件序号 | 部件名称 | 数量 | 说明 |
|---|---|---|---|
| 1 | 头部相机(Intel D455) | 1 | 用于头部感知 |
| 2 | 腕部相机(Intel D405) | 2 | 用于腕部感知 |
| 3 | 激光雷达(MID-360S) | 1 | SLAM |
| 4 | 主机端盖 | 1 | 用于推理主机接口维护 |
| 5 | 推理主机接口 | 1 x USB 3.2 Gen 2x2 port(s)(1 x USB Type-C(®)) 1 x USB 3.2 Gen 2 port(s) (1 x Type-A) 3x USB 3.2 Gen 1 port(s) (2 x Type-A, 1 x USB Type-C(®)) 4 x USB 2.0 port(s) (4 x Type-A) 1 x HDMI(®) port 1 x DisplayPort 1 x Intel(®) 2.5Gb Ethernet | 头部相机和腕部相机连接 |
| 6 | 二指夹爪 | 2 | 末端执行器 |
| 7 | 背部急停按钮 | 1 | 用于意外情况时整机运动停止 |
| 8 | 抱闸释放按钮 | 1 | 解锁机器人以便手动拖动机器人 |
| 9 | 把手 | 1 | 用于拖动机器人运动 |
| 10 | 移动平台急停按钮 | 1 | 用于意外情况时整机运动停止 |
| 11 | 主机电源按钮 | 1 | 用于主机启动、关闭和强制关闭 |
| 11 | 主机电源按钮 | 1 | 用于主机启动、关闭和强制关闭 |
| 11 | HDMI接口 | 1 | 用于连接外部显示器 |
| 12 | 电池供电接口 | 1 | 锂电池供电接口 |
| 13 | 锂电池 | 1 | 用于机器人整机供电 |
| 14 | 电池端盖 | 1 | 用于锂电池的固定 |
| 15 | 空气开关 | 1 | 用于整机电源的通断 |
| 16 | 充电接口航空插头 | 1 | 充电器连接接口 |
| 17 | LAN | 1 | 用于网络通信 |
| 18 | 电源按钮 | 1 | 用于整机的启动、关闭、状态指示等 |
| 19 | 旋钮开关 | 1 | 用于末端执行器CAN和RS485总线转换 |
| 20 | USB2.0 | 3 | 用于连接外部设备如VR、鼠标、键盘等 |
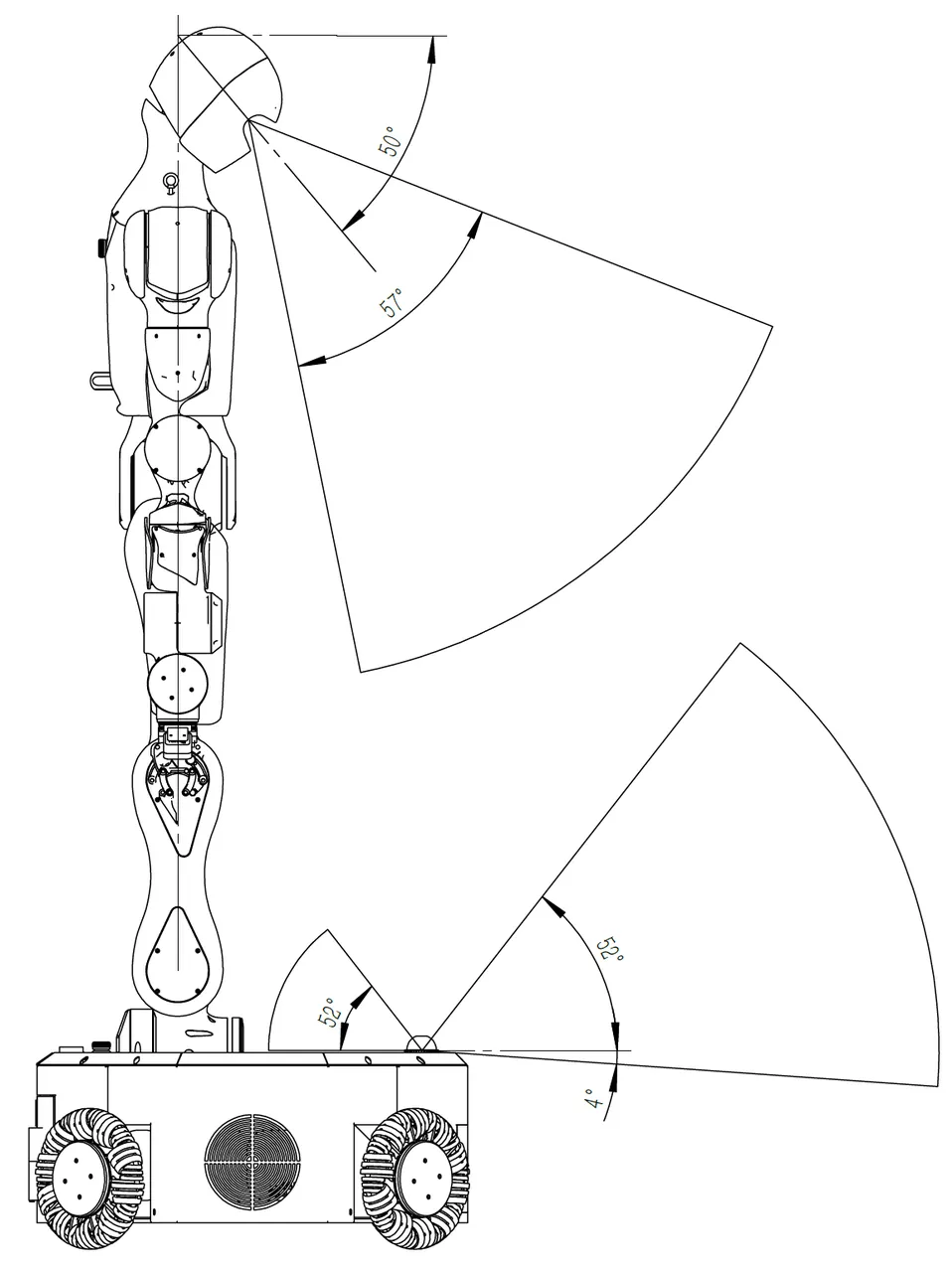
头部相机和雷达视场角
Moz1 头部相机默认和水平方向的夹角为50°,视场范围如下图所示。如需调节头部相机角度,可参照章节头部角度调节。激光雷达水平放置于移动平台上,视场范围如下图所示。
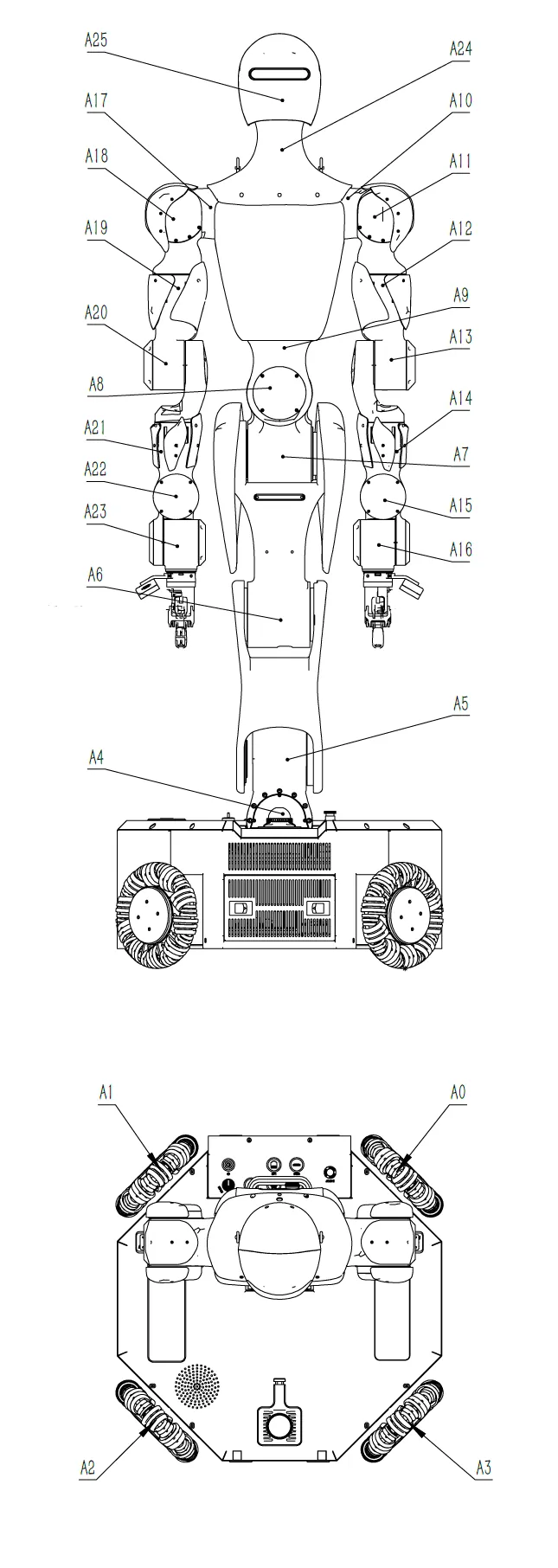
工作范围和速度
Moz1各轴序号及运动范围和速度限制如下:
| MU名称 | 关节序号 | 名称 | 关节限位(Deg) min | 关节限位(Deg) max | 速度限制(Deg/s) | 笛卡尔速度 vel(mm/s) | 笛卡尔速度 rot(deg/s) |
|---|---|---|---|---|---|---|---|
| Base | A0 | Base-0 | -inf | inf | 205 | 500 | 60 |
| Base | A1 | Base-1 | -inf | inf | 205 | ||
| Base | A2 | Base-2 | -inf | inf | 205 | ||
| Base | A3 | Base-3 | -inf | inf | 205 | ||
| LegWaist | A4 | LegWaist-0 | -30 | 30 | 65 | ||
| LegWaist | A5 | LegWaist-1 | -90 | 90 | 65 | ||
| LegWaist | A6 | LegWaist-2 | -145 | 1 | 65 | ||
| LegWaist | A7 | LegWaist-3 | -10 | 80 | 65 | ||
| LegWaist | A8 | LegWaist-4 | -30 | 30 | 65 | ||
| LegWaist | A9 | LegWaist-5 | -180 | 180 | 65 | ||
| LeftArm | A10 | LeftArm-0 | -180 | 120 | 210 | ||
| LeftArm | A11 | LeftArm-1 | -170 | 9 | 210 | ||
| LeftArm | A12 | LeftArm-2 | -175 | 175 | 240 | ||
| LeftArm | A13 | LeftArm-3 | -129 | 10 | 240 | ||
| LeftArm | A14 | LeftArm-4 | -175 | 175 | 300 | ||
| LeftArm | A15 | LeftArm-5 | -95 | 95 | 300 | ||
| LeftArm | A16 | LeftArm-6 | -90 | 90 | 300 | ||
| RightArm | A17 | RightArm-0 | -120 | 180 | 210 | ||
| RightArm | A18 | RightArm-1 | -170 | 9 | 210 | ||
| RightArm | A19 | RightArm-2 | -175 | 175 | 240 | ||
| RightArm | A20 | RightArm-3 | -10 | 129 | 240 | ||
| RightArm | A21 | RightArm-4 | -175 | 175 | 300 | ||
| RightArm | A22 | RightArm-5 | -95 | 95 | 300 | ||
| RightArm | A23 | RightArm-6 | -90 | 90 | 300 | ||
| Neck | A24 | Neck-0 | -65 | 65 | 114.6 | ||
| Neck | A25 | Neck-1 | -3 | 50 | 114.6 |
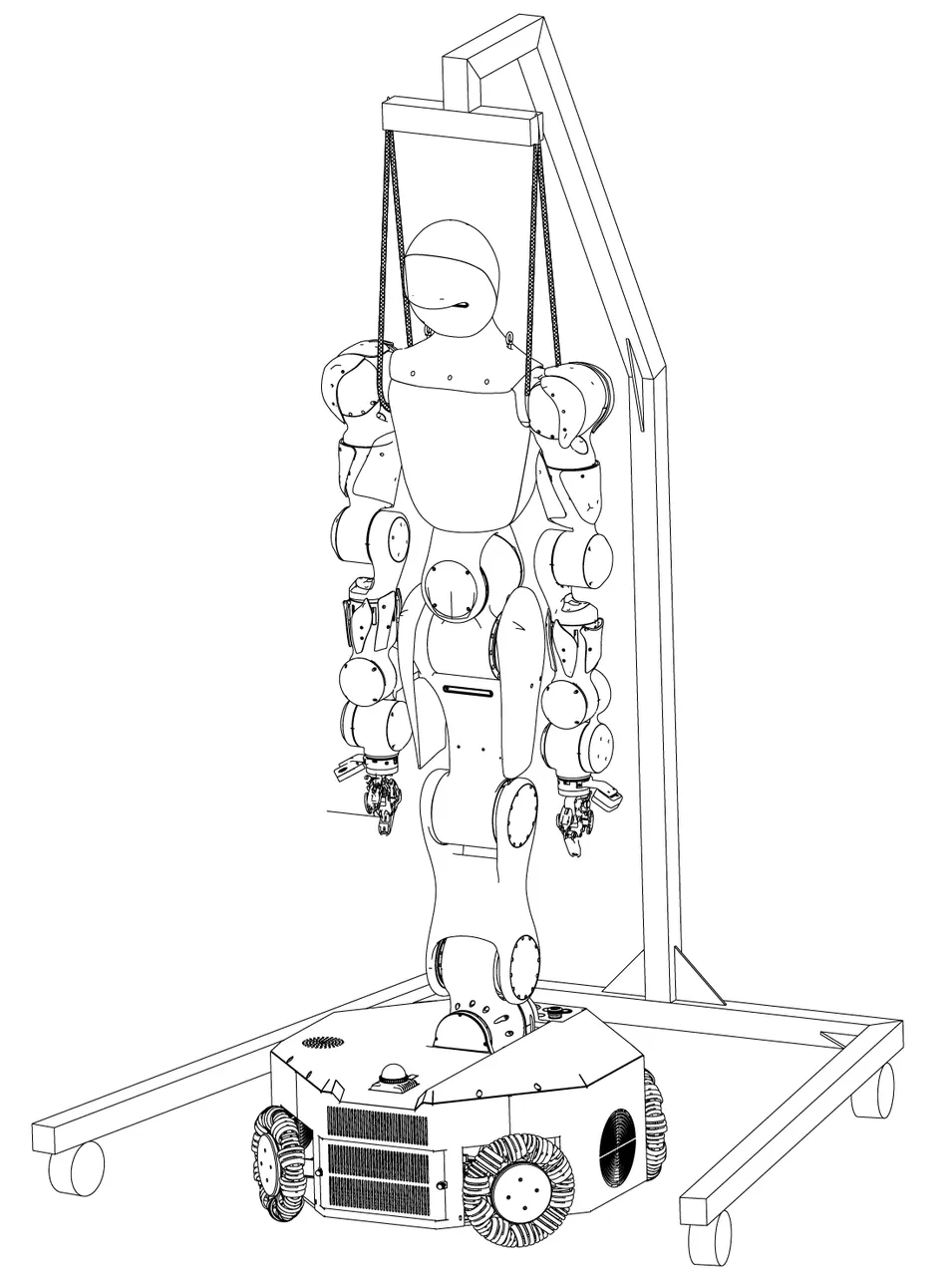
吊装示意
在机器人维护或调试过程中,为了机器人和使用者安全,建议使用吊架对机器人进行保护,吊装示意图如下图:
移动平台
移动平台概述
本产品移动平台为机器人核心运动与控制单元,集成动力驱动、电源管理、AI推理、网络通信及安全控制等功能模块。移动平台支持标准充电、网络通信与紧急安全控制,适用于各类工业、服务场景中的自主移动作业。
供电
充电接口(LP20型 3芯法兰母座)(接口15)
机器人本体的充电接口位于移动平台右侧中央位置,紧邻底部支撑板,采用 LP20 型 3芯法兰母座 形式,需配合专用插头的 Moz1 电源线进行充电。
使用说明:
- 请确保充电线缆与电源适配器匹配,避免使用非原厂配件。
- 充电过程为手动操作,需由操作人员现场连接并确认接通状态。
- 严禁在机器人运行中进行充电连接或断开操作,以防意外触发。
充电参数规格表
| 序号 | 指标 | 备注 |
|---|---|---|
| 1 | 充电参数 | 54.8V / 10A(恒流恒压) |
| 2 | 充电形式 | 手动连接(需人工操作) |
| 3 | 循环次数 | ≥1000 次(建议定期检测电池健康) |
| 4 | 综合续航 | ≥1000 次完整充放循环 |
DANGER
注意事项:
- 充电时请确认机器人处于“停止”状态,且无其他外部干扰。
- 若充电过程中出现异常(如过热、异味),请立即断电并联系技术支持。