Moz 1 Issac Sim 仿真平台使用教程
本教程旨在指导用户在 Isaac Sim 仿真平台上快速部署和使用 Moz1 机器人。教程内容包括简化版的快速启动流程和完整版仿真操作。使用本教程前,请确保已下载所有相关资源和材料。
- 下载资源包 ISAAC_MOZ1
一、Docker设置
1.1 系统要求
请确保您的系统满足运行 NVIDIA Isaac Sim 的系统要求:
1.1.1 x86_64 要求
| 元素 | 最低规格 | 适配规格 | 理想规格 |
|---|---|---|---|
| 操作系统 | Ubuntu 22.04/24.04 Windows 10/11 | Ubuntu 22.04/24.04 Windows 10/11 | Ubuntu 22.04/24.04 Windows 10/11 |
| CPU | Intel Core i7 (7th Generation) AMD Ryzen 5 | Intel Core i7 (9th Generation) AMD Ryzen 7 | Intel Core i9 X-series or higher AMD Ryzen 9, Threadripper or higher |
| Core | 4 | 8 | 16 |
| Ram | 32GB | 64GB | 64GB |
| 硬盘 | 50GB SSD | 500GB SSD | 1TB NVMe SSD |
| GPU | GeForce RTX 4080 | GeForce RTX 5080 | RTX PRO 6000 Blackwell |
| 显存 | 16GB | 16GB | 48GB |
| 驱动 | Linux: 580.65.06 Windows: 580.88 | Linux: 580.65.06 Windows: 580.88 | Linux: 580.65.06 Windows: 580.88 |
显存容量低于 16GB 的 GPU 可能不足以运行每帧渲染超过 16MP 的复杂场景。如果您的需求是此类场景,请考虑升级到更高规格的显卡。建议为 Isaac Sim 的高级使用配置增加内存(RAM)和显存(VRAM)。Isaac Lab 的使用也需要额外的内存和显存来进行培训。
1.1.2 aarch64 要求
| 元素 | 最低规格 |
|---|---|
| 设备 | NVIDIA DGX™ Spark |
| 操作系统 | NVIDIA DGX OS 7.2.3 |
| 驱动 | 580.95.05 |
1.2 安装 Docker
# Docker installation using the convenience script
curl -fsSL https://get.docker.com -o get-docker.sh
sudo sh get-docker.sh
# Post-install steps for Docker
sudo groupadd docker
sudo usermod -aG docker $USER
newgrp docker
# Verify Docker
docker run hello-world若安装有问题,参见:
1.3 安装 Nvidia Docker Toolkit
# Configure the repository
curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg \
&& curl -s -L https://nvidia.github.io/libnvidia-container/stable/deb/nvidia-container-toolkit.list | \
sed 's#deb https://#deb [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] https://#g' | \
sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list \
&& \
sudo apt-get update
# Install the NVIDIA Container Toolkit packages
sudo apt-get install -y nvidia-container-toolkit
sudo systemctl restart docker
Configure the container runtime
sudo nvidia-ctk runtime configure --runtime=docker
sudo systemctl restart docker
# Verify NVIDIA Container Toolkit
docker run --rm --runtime=nvidia --gpus all ubuntu nvidia-smi二、Docker部署
本节主要介绍如何在本地以容器形式部署 Isaac Sim,以便支持后续的仿真运行与开发流程。
- 设置并安装容器必备组件。请参阅上文 “Docker设置” 部分。
- 运行以下命令以确认您的 GPU 驱动程序版本:nvidia-smi
- 加载 Issac Sim Docker:
cd isaac_moz1/ # cd至安装包位置
docker load -i isaac-sim-5.1.0.tar # 加载镜像
docker images # 查看容器是否在本地部署若出现 nvcr.io/nvidia/isaac-sim:5.1.0 字样,则代表容器在本地加载成功
- 在主机上创建缓存卷挂载点:
mkdir -p ~/docker/isaac-sim/cache/main/ov
mkdir -p ~/docker/isaac-sim/cache/main/warp
mkdir -p ~/docker/isaac-sim/cache/computecache
mkdir -p ~/docker/isaac-sim/config
mkdir -p ~/docker/isaac-sim/data/documents
mkdir -p ~/docker/isaac-sim/data/Kit
mkdir -p ~/docker/isaac-sim/logs
mkdir -p ~/docker/isaac-sim/pkg
sudo chown -R 1234:1234 ~/docker/isaac-sim- 检查系统是否与 Isaac Sim 兼容:
./check_isaac.sh若最终出现 app ready 或 Isaac Sim Full Streaming App is loaded. 等字样,则说明系统兼容使用 Isaac Sim仿真平台。
三、仿真启动
本节主要 Isaac Sim Docker 实现 Moz1 后续的开发使用进行载入,支持快速启动和完整载入两种方式。若需要对于场景进行二次开发和资产导入,请前往 NVIDIA Issac Assets 官网进行查阅和资产下载。
INFO
注:请将下载的资产文件解压至 isaac_moz1/Issacsim_Assets 目录下,以确保后续在 Docker 环境中能够正确挂载并正常使用。
3.1 轻量版快速启动
”快速启动“ 功能面向需要云端批量仿真和自动化训练的企业客户,支持无 GUI 的高速物理模拟、数据生成和程序化控制流程。在 Isaac_Moz1 路径下运行以下命令:
docker compose up第一次载入时间较长(请耐心等待,不要点击 “强制退出” ),载入成功后出现以下画面:
出现上述画面后即可进行简单的开发仿真等。
3.2 扩展版完整载入
“完整载入” 功能面向需要搭建、调试和可视化机器人场景的研发客户,支持完整扩展、图形界面、物理调试和交互式开发环境。在 Isaac_Moz1 路径下运行以下命令:
./start_isaac.sh
# 进入docker后
./isaac-sim.sh第一次载入时间较长(请耐心等待,不要点击 “强制退出” ),载入成功后出现以下画面: 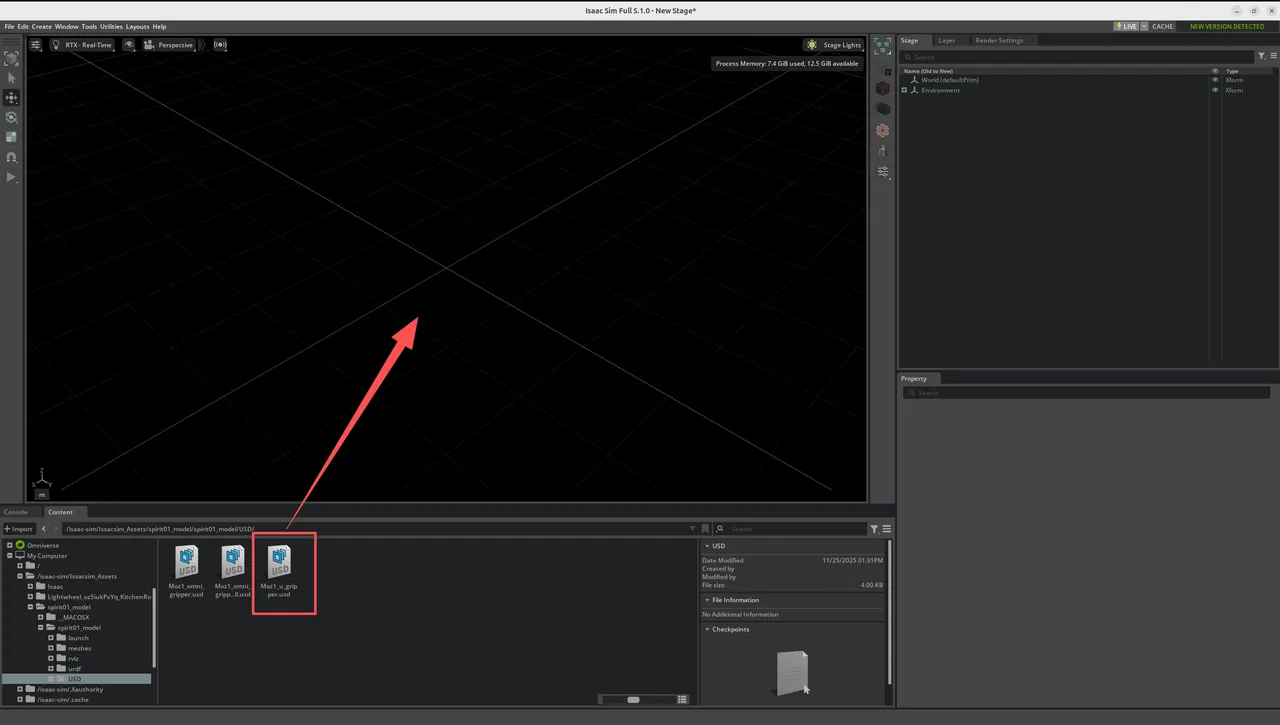
在资产部分根据路径 Issacsim_Assets/spirit01_model/spirit01_model/USD/Moz1_* (容器内部路径)找到对应资产后,拖入中间 Stage 部分,

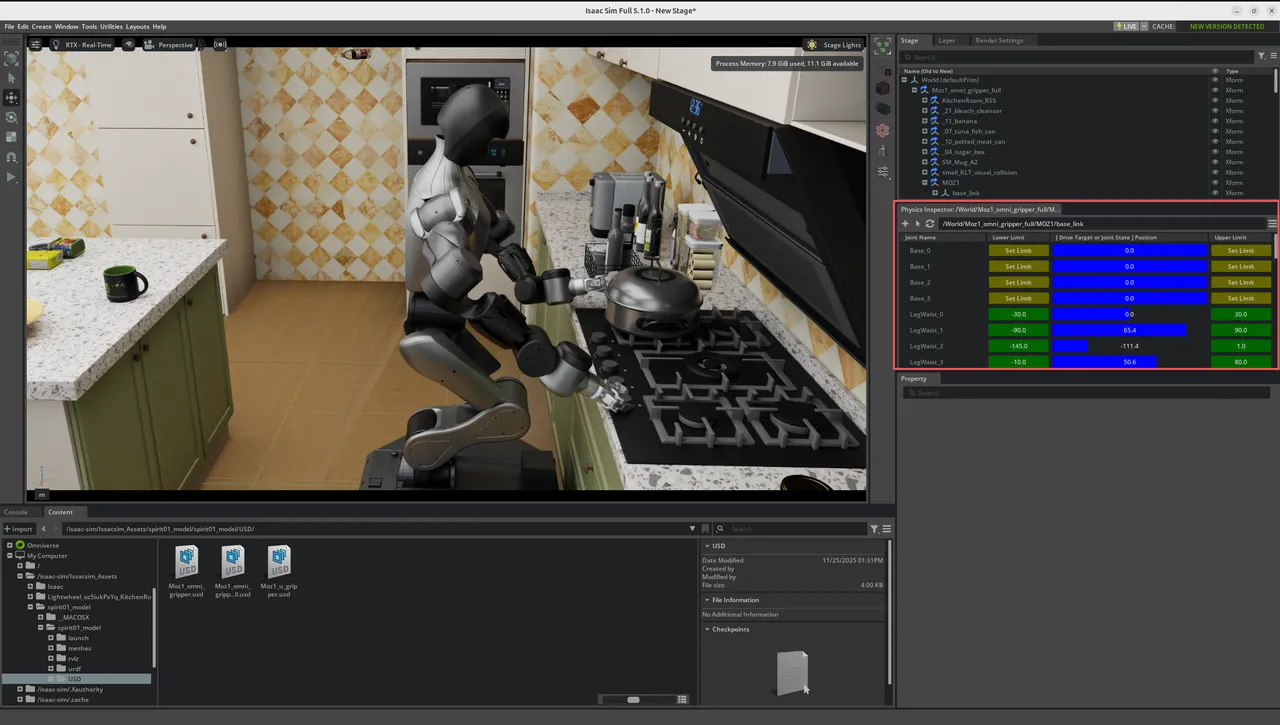
出现以下画面即代表 Moz1 机器人及相关场景加载成功: 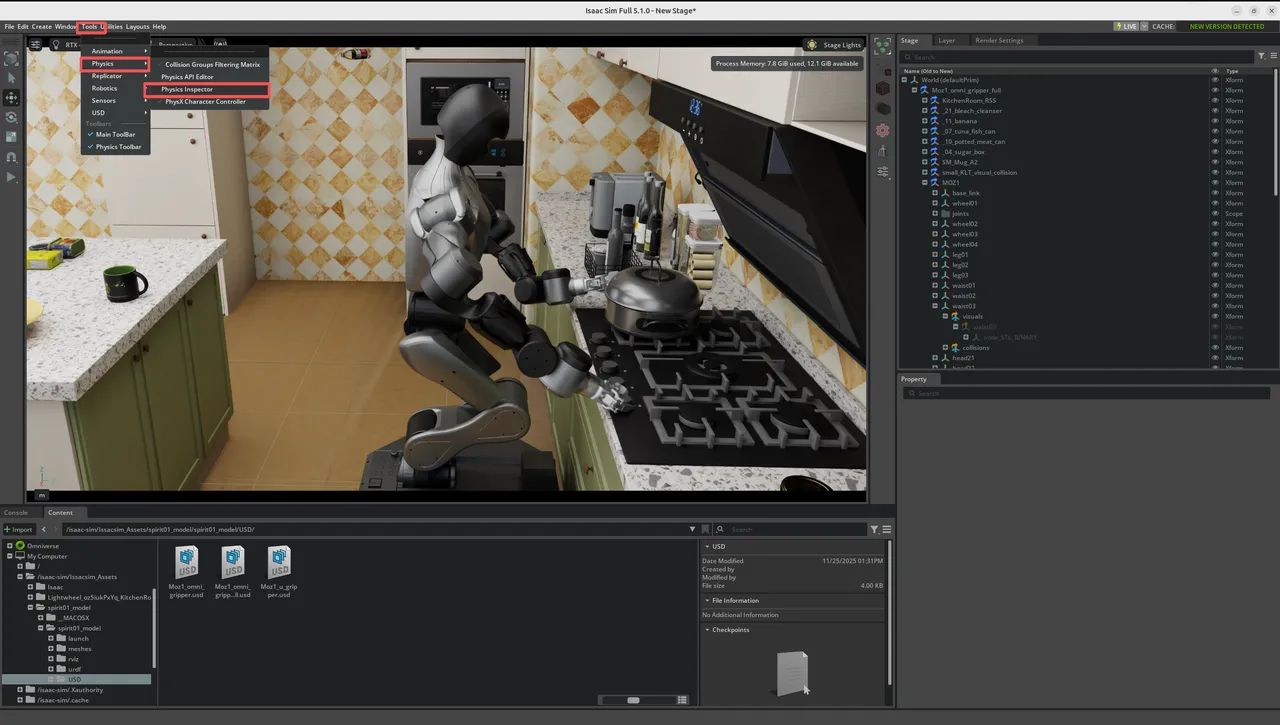
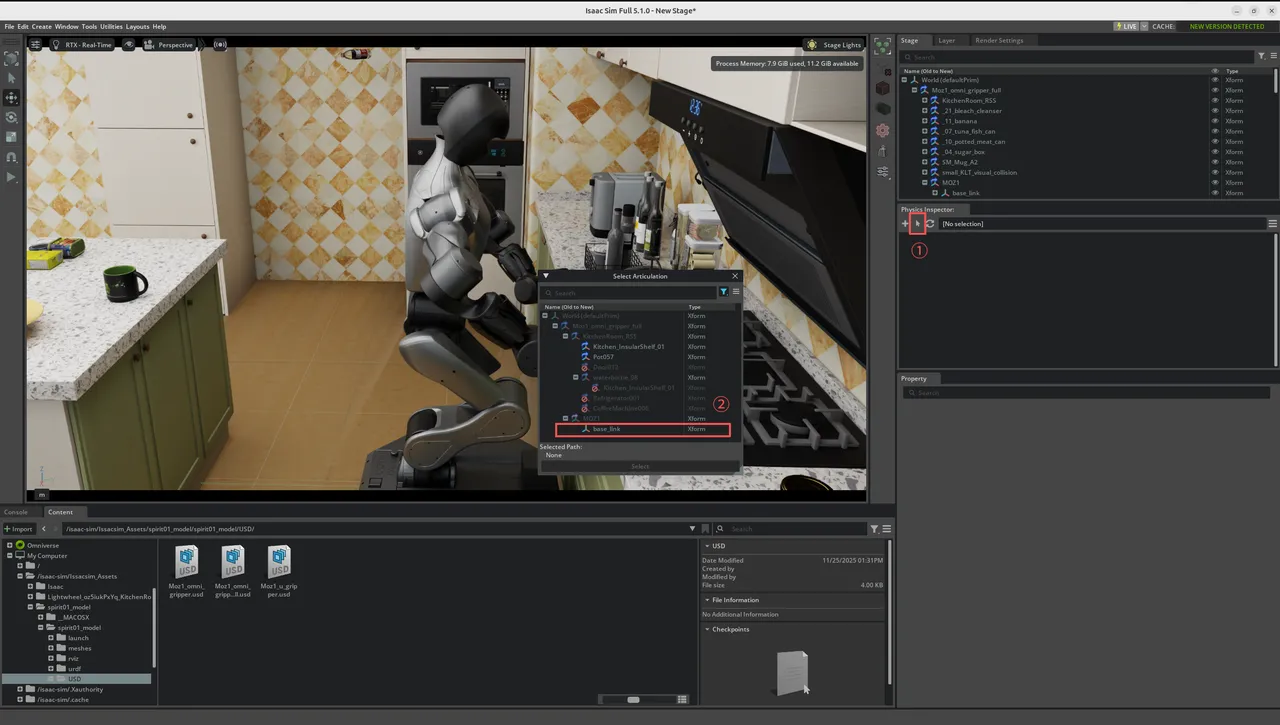
如需对机器人各关节角度进行可视化调整,可通过菜单 Tool → Physics → Physics Inspector 打开物理属性编辑器进行操作,如下图所示。 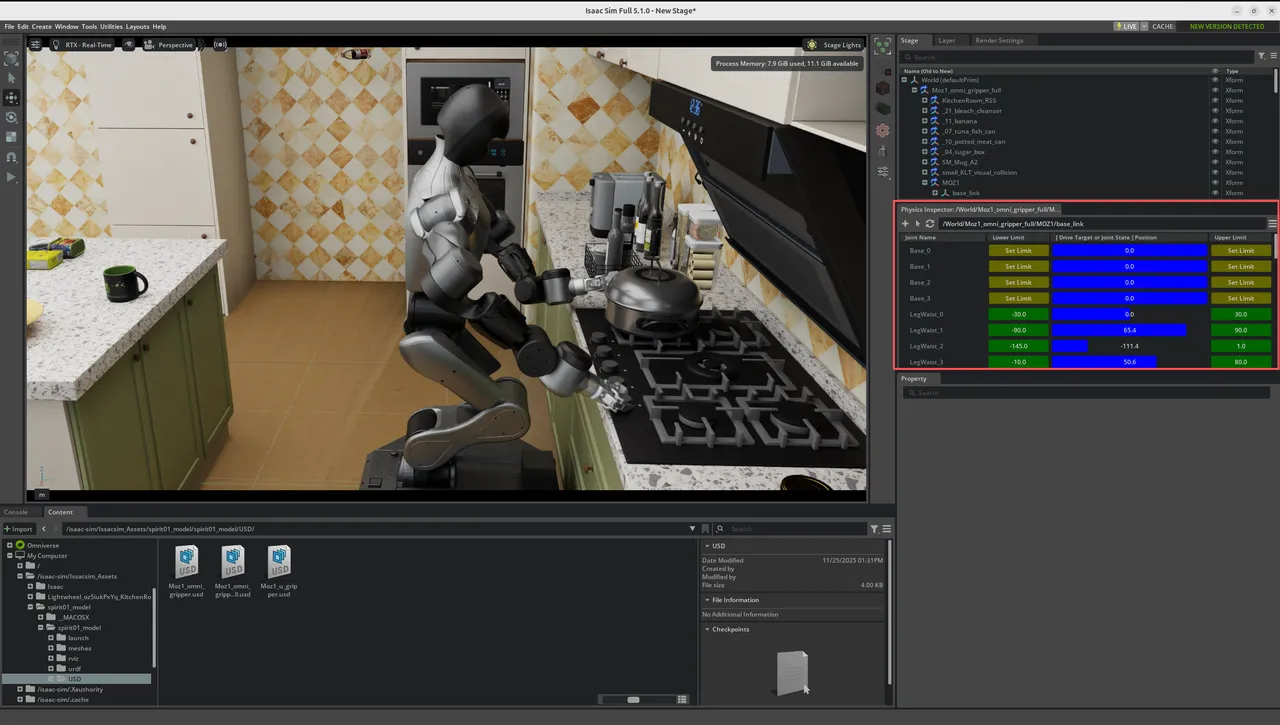
选择 Moz1 机器人后,即可在可视化 GUI 界面中通过拖动关节滑块完成关节调试与动作预览。
四、文件说明与备注
请联系客服获取下方 ISAAC_MOZ1 文件,相关说明如下:
ISAAC_MOZ1/
├── Issacsim_Assets/ # Issac 相关资产
│ ├── Isaac/5.1/ # Issac 官方资产
│ ├── Lightwheel_oz5iukPxYq_KitchenRoom/ # kitchen 相关生活资产
│ └── spirit01_model/ # Moz1 机器人本体硬件设计相关文件
│ └── spirit01_model/
│ ├── launch/ # Ros 启动文件
│ ├── meshes/ # Moz1 硬件Mesh文件
│ ├── rviz/ # Ros 可视化文件
│ ├── urdf/ # Moz1 整体描述文件
│ ├── USD/ # Isaac 场景描述文件
│ ├── CMakeLists.txt
│ └── package.xml
│
├── docker-compose.yml # 轻量版 Docker 启动文件
├── entrypoint.sh # 轻量版 Docker 接入点文件
├── start_isaac.sh # 完整版 Docker 启动文件
├── check_isaac.sh # 系统兼容性检查文件
├── isaac-sim-5.1.0.tar # NVIDIA Issac 官方镜像压缩文件
└── ...本版本仿真仅包含 Kitchen 相关场景及其配套资产。如需其他环境,请根据项目需求自行搭建。Moz1 的末端执行器已预装夹爪:OmniGripper,可直接用于相关任务的仿真与测试。